
Abstract
Background/purpose
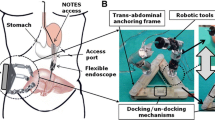
Natural orifice transluminal endoscopic surgery (NOTES) offers the possibility of surgery without visible scars. To overcome the limitations of NOTES, we developed a novel surgical device called the rigid and flexible outer sheath with multi-piercing surgery (MPS).
Methods
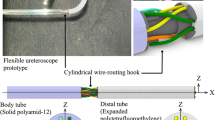
This sheath can switch between flexible and rigid modes using a novel “Dragon skin” structure and a negative pneumatic shape-locking mechanism. In addition, it has an integrated bending structure that enables it to flex in four directions at the distal end. The insertion part of the prototype is 575 mm long with a 20 mm outer diameter. The rigid and flexible shaft is separated into two parts. The primary and secondary shape-locking shafts are 300 and 200 mm long, respectively. The two parts of shape-locking shaft can be locked independently, including both being locked simultaneously. In addition, the model was equipped with one 7- and 1.7-mm-diameter, and three 3-mm-diameter working channels. When the sheath approaches the target, the surgeon locks the shape and then easily inserts flexible instruments through the path created by the sheath. In this study, we evaluated the stiffness of the prototype. Furthermore, an in vivo partial gastrectomy experiment was also performed.
Results
The experimental results regarding the shape property suggest that the rigidity of the shaft was considerably increased using this mechanism. An in vivo partial gastrectomy experiment performed using a swine was successfully performed using the outer sheath for assistance. The outer sheath was inserted through a percutaneous route during the in vivo experiment.
Conclusions
The evaluation results show that the advanced outer sheath system has great promise for solving access and stability problems with NOTES.








Similar content being viewed by others

References
Pearl JP, Ponsky JL (2008) Natural orifice translumenal endoscopic surgery: a critical review. J Gastrointest Surg 12:1293–1300
De la Fuente SG, DeMaria EJ, Reynolds JD, Portenier DD, Pryor AD (2007) New developments in surgery: natural orifice transluminal endoscopic surgery (NOTES). Arch Surg 142:295–297
Rattner D, Kalloo A (2006) ASGE/SAGES working group on natural orifice translumenal endoscopic surgery. J Surg Endosc 20:329–333
Marescaux J, Dallemagne B, Perretta S, Wattiez A, Mutter D, Coumaros D (2007) Surgery without scars: report of transluminal cholecystectomy in a human being. J Arch Surg 142:823–826
Haber GP, Crouzet S, Kamoi K, Berger A, Aron M, Goel R, Canes D, Desai M, Gill IS, Kaouk JH (2008) Robotic NOTES (natural orifice translumenal endoscopic surgery) in reconstructive urology: initial laboratory experience. Urology 71:996–1000
Vitale GC, Davis BR, Tran TC (2005) The advancing art and science of endoscopy. J Am J Surg 190:228–233
Hu B, Chung SC, Sun LC, Lau YJ, Kawashima K, Yamamoto T, Cotton PB, Gostout CJ, Hawes RH, Kaloo An, Kantsevoy SV, Pasricha PJ (2005) Endoscopic suturing without extracorporeal knots: a laboratory study. J Gastrointest Endosc 62:230–233
Suzuki N, Sumiyama K, Hattori A, Ikeda K, Murakami EAY, Suzuki S, Hayashibe M, Otake Y, Tajiri H (2003) Development of an endoscopic robotic system with two hands for various gastric tube surgeries. Med Meets Virtual Real 11:349–353
Phee SJ, Low SC, Huynh VA, Kencana AP, Sun ZL, Yang K (2009) Master and slave transluminal endoscopic robot (MASTER) for natural orifice transluminal endoscopic surgery (NOTES). In: Proceedings of the 31st IEEE engineering in medicine and biology society, vol 1, pp 1192–1195
Sturges RH, Laowattana S Jr (1991) A flexible, tendon-controlled device for endoscopy. In: Proceedings of the 1991 IEEE international conference on robotics and automation, vol 3, pp 2582–2591
Amir D, Howie C, Alon W, Takeyoshi O, Marco A, Z (2006) Percutaneous intrapericardial interventions using a highly articulated robotic probe. In: The first IEEE/RAS-EMBS international conference on biomedical robotics and biomechatronics, pp 7–12
Swanstrom L, Kozarek R, Pasricha PF, Gross S, Birkett D, Park PO, Saadat V, Ewers R, Swain P (2005) Development of a new access device for transgastric surgery. J Gastrointest Surg 9:1129–1137
Mullady DK, Lautz DB, Thompson CC (2009) Treatment of weight regain after gastric bypass surgery when using a new endoscopic platform: initial experience and early outcomes. Gastrointest Endosc 70(3):440–444
Notash L (2011) Failure recovery for wrench capability of wire-actuated parallel manipulators. Robotica. doi:10.1017/S0263574711001160
Mamazza J, Schlachta CM, Seshadri PA, Cadeddu MO, Poulin EC (2001) Needlescopic surgery: a logical evolution from conventional laparoscopic surgery. Surg Endosc 15:1208–1212
Ohdaira T, Tsutsumi N, Xu H, Mori M, Uemura M, Ieiri S, Hashizume M (2011) Ultra-minimally invasive local immune cell therapy and regenerative therapy by multi-piercing surgery for abdominal solid tumor: therapeutic simulation by natural orifice translumenal endoscopic surgery-assisted needlescopic surgery using 3-mm diameter robots. J Hepatobiliary Pancreat Sci 18(4):499–505
Hellier D et al (2011) Flexural and torsional rigidity of colonoscopes at room and body temperatures. Proceedings of the Institution of Mechanical Engineers, Part H. J Eng Med 225(4):389–399
Wehrmeyer JA et al (1998) Colonoscope flexural rigidity measurement. Med Biol Eng Comput 36(4):475–479
Loeve A, van de Ven O, Vogel J, Breedveld P, Dankelman J (2010) Vacuum packed particles as flexible endoscope guides with controllable rigidity. Granul Matt 12(6):543–554
Zuo S, Masamune K, Kuwana K et al (2011) Nonmetallic rigid-flexible outer sheath with pneumatic shapelocking mechanism and double curvature structure. Med Image Comput Comput Assist Interv 14:169–177
Zuo S, Ohdaira T, Kuwana K et al (2012) Developing essential rigid-flexible outer sheath to enable novel multi-piercing surgery. Med Image Comput Comput Assist Interv 15:26–33
Leung Daniel A, Debatin Jorg F, Sildermuth Simon, Heske Norbert, Dumoulin Charles L, Darrow Robert D, Hauser Markus, Davis Clarence P, Schulthess Gustav K (1995) Real-time biplanar needle tracking for interventional MR imaging procedures. Radiology 197(2):485–488
Acknowledgments
All the authors have read the manuscript and have approved this submission. Siyang Zuo, Kazuo Iijima, Takahiro Tokumiya, and Ken Masamune declare that they have no conflict of interest.
Conflict of interest
Ken Masamune and Siyang Zuo are researchers of the University of Tokyo and receive research funding from SAMSUNG Yokohama Research Institute (Project #121400000191), which is developing products related to the research described in this paper. Kazuo Iijima and Takahiro Tokumiya are senior researchers of SAMSUNG Yokohama Research Institute and serve on the company’s ER Center ET-1 Team.
Ethical standard
The study design was approved by an ethics review board. All animal studies have been approved by the appropriate ethics committee. All institutional and national guidelines for the care and use of laboratory animals were followed.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article
Cite this article
Zuo, S., Iijima, K., Tokumiya, T. et al. Variable stiffness outer sheath with “Dragon skin” structure and negative pneumatic shape-locking mechanism. Int J CARS 9, 857–865 (2014). https://doi.org/10.1007/s11548-014-0981-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-014-0981-4