
Abstract
This article shows the design of a robust second-order sliding mode controller to solve the trajectory tracking problem of an active orthosis for assisting back physiotherapies. The orthosis was designed in agreement with morphological dimensions and its articulations distribution followed the same designing rules. The orthosis has six articulated arms attached to an articulated column. The orthosis was fully instrumented with actuators and position sensors at each articulation. The controller implemented a class of hybrid/position controller depending on the relative force exerted by the patient and the orthosis movement. The position information provided by each articulation was supplied to a distributed super-twisting differentiator to recover the corresponding angular velocity. A set of twisting controllers was implemented to regulate the position of the robot in agreement to predefined reference trajectories. Reference trajectories were obtained from a biomechanical-based analysis. The hybrid tracking control problem solved the automation of the assisted therapy to the patient, including the force feedback. The performance of the orthosis was tested with different dummy bodies with different resistance. The robust output feedback controller successfully tracked the reference trajectories despite the material of the dummy used during the testing. The orthosis was evaluated with two volunteers using a simple reference trajectory.

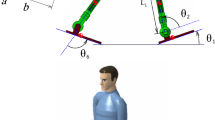
General structure of the active back assisted orthosis




















Similar content being viewed by others


References
Bland JH, Boushey DR (1990) Anatomy and physiology of the cervical spine. Semin Arthritis Rheum 20:1–20
McGil S (2007) Low back disorders: evidenced-based prevention and rehabilitation. Human Kinetics. [Online]. Available: http://books.google.com.mx/books?id=j0R4-fzBwPIC
White AA, Panjabi MM (1978) Clinical biomechanics of the spine. Lippincott. [Online]. Available: http://books.google.com.mx/books?id=U5NsAAAAMAAJ
Eisenberg MG (1995) Dictionary of rehabilitation. Springer Publishing Company
Bergmark A (1989) Stability of the lumbar spine. Acta Orthopedica Scandinavica 230:1–54
Valentin GH, Pedersen LN, Maribo T (2014) Wearing an active spinal orthosis improves back extensor strength in women with osteoporotic vertebral fractures. Prosthetics Orthotics Int 38(3):232–238. [Online]. Available: https://doi.org/10.1177/0309364613497393
Olivier J, Ortlieb A, Bouri M, Bleuler H (2015) Mechanisms for actuated assistive hip orthoses. Robot Auton Syst 73:59–67. wearable Robotics
Sypert GW (1987) External spinal orthotics. Neurosurgery 20(4):642–649
Luenberger L, Colombo G, Riener R, Dietz V (2004) Biofeedback in gait training with the robotic orthosis lokomat. In: IEMBS 26th Annual international conference of the IEEE engineering in medicine and biology society, vol 2, pp 4888–4891
Hyun DJ, Park H, Ha T, Park S, Jung K (2017) Biomechanical design of an agile, electricity-powered lower-limb exoskeleton for weight-bearing assistance. Robot Auton Syst 95:181–195
Asbeck AT, Schmidt K, Walsh CJ (2015) Soft exosuit for hip assistance. Robot Autonom Syst 73:102–110. wearable robotics
Giovacchini F, Vannetti F, Fantozzi M, Cempini M, Cortese M, Parri A, Yan T, Lefeber D, Vitiello N (2015) A light-weight active orthosis for hip movement assistance. Robot Auton Syst 73:123–134. wearable robotics
Spong M, Hutchinson S, Vidyasagar M (2006) Robot modelling and control, F. edn. Wiley
Kingsley C, Poursina M, Sabet S, Dabiri A (2017) Logarithmic complexity dynamics formulation for computed torque control of articulated multibody systems. Mech Mach Theory 116:481–500. [Online]. Available: http://www.sciencedirect.com/science/article/pii/S0094114X1630221X
Castaneda A, Luviano A, Chairez I (2014) Robust trajectory tracking of a delta robot through adaptive active disturbance rejection control. IEEE Trans Control Syst Technol, 99. https://doi.org/10.1109/TCST.2014.2367313
Codourey A (1996) Dynamic modelling and mass matrix evaluation of the delta parallel robot for axes decoupling control. In: Proceedings of the 1996 IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 1211–1218
Jankowski K, Brussel HV (1992) An approach to discrete inverse dynamics control of flexible-joint robots. IEEE Trans Robot Autom 8(5):651–658
Moreno J, Sánchez T, Cruz-Zavala E (2014) Una función de lyapunov suave para el algoritmo super-twisting. In: Proceedings of the XVI LatinAmerican automatic control congress
Levant A (1998) Robust exact differentiation via sliding mode tecnique. Automatica 34(3):379–384
Moreno J, Alvarez J, Rocha-Cozatl E, Diaz-Salgado J (2010) Super-twisting observer-based output feedback control of a class of continuous exothermic chemical reactors. In: Proceedings of the 9th international symposium on dynamics and control of process systems (DYCOPS). Leuven, pp 727–732
Raibert MH, Craig JJ (1981) Hybrid position/force control of manipulators. J Dyn Syst Measur Control 103(2):126–133
Song P, Yu Y, Zhang X (2017) Impedance control of robots: an overview. In: 2017 2nd international conference on cybernetics, robotics and control (CRC), pp 51–55
Utkin V, Guldner J, Shi J (2009) Sliding mode control in electro-mechanical systems, 2nd edn. Automation and Control Engineering
Moreno J (2012) A lyapunov approach to output feedback control using second-order sliding modes. IMA J Math Control Inf Adv
Pisano A, Davila A, Fridman L, Usai E (2008) Cascade control of pm dc drives via second-order sliding-mode technique. IEEE Trans Ind Electron 55(11):3846–3854
Mobayen S, Tchier F, Ragoub L (2017) Design of an adaptive tracker for n-link rigid robotic manipulators based on super-twisting global nonlinear sliding mode control. Int J Syst Sci 48(9):1990–2002
Levant A (2003) Higher-order sliding modes, differentiation and output-feedback control. Int J Control 76 (9-10):924–941
Ming C, Gang C, Feijie H, Qingxuan J (2013) Active disturbance rejection control for trajectory tracking of manipulator joint with flexibility and friction. Appl Mech Mater 325-326 :1229–1232
Hill J, Fahimi F (2011) Active disturbance rejection for bipedal walk of a humanoid using the motion of the arms. In: ASME 2011 International mechanical engineering congress and exposition, pp 137–144
Poznyak A, Sánchez E, Wen Y (2001) Differential neural networks for robust nonlinear control (Identification, state estimation and trajectory tracking). World Scientific Press
Peña GG, Consoni LJ, dos Santos WM, Siqueira AA (2019) Feasibility of an optimal emg-driven adaptive impedance control applied to an active knee orthosis, vol 112. [Online]. Available: http://www.sciencedirect.com/science/article/pii/S0921889018304263
Cheah C-C, Wang D (1998) Learning impedance control for robotic manipulators. IEEE Trans Robot Autom 14(3):452–465
Yongling F, Xu H, Sepehri N, Guozhe Z, Jian F, Liming Y, Rongrong Y (2018) Design and performance analysis of position-based impedance control for an electrohydrostatic actuation system. Chin J Aeronaut 31(3):584–596
Hogan N (1987) Stable execution of contact tasks using impedance control. In: IEEE International conference on robotics and automation, pp 1047–1054
Tucker MR, Olivier J, Pagel A, Bleuler H, Bouri M, Lambercy O, del Millán RJ, Riener R, Vallery H, Gassert R (2015) Control strategies for active lower extremity prosthetics and orthotics: a review. J Neuroeng Rehab 12(1):1
Haddad WM, Chellaboina V (2008) Nonlinear dynamical systems and control. Princeton University Press
Moreno A, Osorio M (2012) Strict lyapunov funtions for the super-twisting algorithm. IEEE Tran Aut Cont 57(4):1035–1040
Salgado I, Chairez I, Camacho O, Yanez C (2014) Super-twisting sliding mode differentiation for improving pd controllers performance of second order systems. IS 53(4):1096–1106
Gao Z (2006) Active disturbance rejection control: a paradigm shift in feedback control system design. In: American control conference. Minneapolis, pp 2399–2405
Polyakov A, Chairez I (2014) A new homogeneous quasi-continuous second order sliding mode control. In: Proceedings of the XVI Latin American automatic control congress
Levant A (2007) Finite differences in homogeneous discontinuous control. IEEE Trans Autom Control 52 (7):1208–1217
Acknowledgments
The authors acknowledge Dr. Alberto Luviano (UPIITA-IPN) for his remarkable and useful comments on the results achieved in this paper.
Funding
The authors thank the financial support provided by the National Polytechnic Institute through the Research Grants labelled SIP-20 196709, SIP-20195253.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ballesteros-Escamilla, M., Cruz-Ortiz, D., Salgado, I. et al. Hybrid position/force output feedback second-order sliding mode control for a prototype of an active orthosis used in back-assisted mobilization. Med Biol Eng Comput 57, 1843–1860 (2019). https://doi.org/10.1007/s11517-019-01987-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11517-019-01987-y