
Abstract
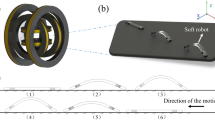
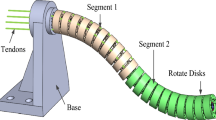
Based on the inchworm movement, a miniature endoscope inspection robot system with a flexible structure is designed. The system is actuated by a pneumatic rubber actuator with three degrees of freedom, and it holds its position by air chambers. The actuating mechanics characteristics of the robot are analyzed. An electro-pneumatic pressure system is designed to control the motion of the robot. Results of the calculation and experiments are consistent, and the robot system can move smoothly in a soft tube.
Similar content being viewed by others

References
Hunter I W, Lafontaine S R, Brenan, et al. Medical robots and micro machines. In: Proceedings of 1995 IEEE, the Sixth International Symposium on Micro Machine and Human Science, 4–6 Oct. 1995: 25–30
Ikeuchi K, Yoshinaka K, Hashimoto S, et al. Locomotion of medical micro robot with spiral ribs using Mucus. In: Proceedings of 1996 IEEE International Symposium on Micro Machine and Human Science. 1996: 217–222
Anthierens C, Libersa C, Touaibia M, et al. Micro robots dedicated to small diameter canalization exploration. In: Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems. 2000, 1: 480–485
Sun Linzhi, Sun Ping, Qin Xinjie, et al. Micro robot in small pipe with electromagnetic actuator. In: Proceedings of the 1998 International Symposium on Micromechatronics and Human Science. 1998: 243–248
Lee Y P, Kim B, Lee M G, et al. Locomotive mechanism design and fabrication of biomimetic micro robot using shape memory alloy. In: Proceedings of 2004 IEEE International Conference on Robotics and Automation. 2004, 5: 5007–5012
Fukui R, Torii A, and Ueda A. Micro robot actuated by rapid deformation of piezoelectric elements. In: Proceedings of 2001 International Symposium on Micromechatronics and Human Science. 2001: 117–122
Lee T H, Leung F H F, Tam P K S. Position control for wheeled mobile robots using a fuzzy logic controller. In: Proceedings of 25th Annual Conference of the IEEE Industrial Electronics Society (IECON’ 99). 1999: 525–528
Fukuda T, Hosokai H, and Uemura M. Rubber gas actuator driven by hydrogen storage alloy for in-pipe inspection mobile robot with flexible struture. In: Proceedings of the IEEE International Conference on Robotics and Automation, Scottsdale Arizona. 1989, 3: 1847–1852
Chou Chingping, Blake Hannaford. Static and dynamic characteristics of Mckibben pneumatic artificial muscles. In: Proceedings of 1994 IEEE Robotic and Automation Conference, San Diego, CA, 1994, 1: 281–286
Sui Liming, Bao Gang, Wang Zuwen. The improved modeling of pneumatic artificial muscle. Hydraulics Pneumatics & Seals, 2002, 4: 1–4 (in Chinese)
Suzumori K, Likura S, Tanaka H. Applying a flexible microactuator to robotic mechanisms. IEEE Control Systems, 1992, 2: 21–26
Mi Zhinan. Technology of sensing and active intervention for robotic endoscope. Chinese Journal of Scientific Instrument, 2001, 22(60): 606–609 (in Chinese)
Author information
Authors and Affiliations
Corresponding author
Additional information
__________
Translated from Chinese Journal of Scientific Instrument, 2007, 28(1): 7–11 [译自: 仪器仪表学报]
Rights and permissions
About this article
Cite this article
Yu, L., Yan, G., Ma, G. et al. Analysis of actuating mechanics characteristics for a flexible miniature robot system. Front. Mech. Eng. China 3, 66–70 (2008). https://doi.org/10.1007/s11465-008-0006-5
Issue Date:
DOI: https://doi.org/10.1007/s11465-008-0006-5