
Abstract
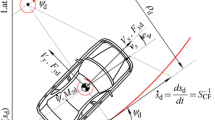
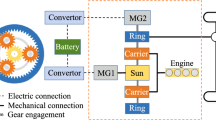
The longitudinal and lateral coordinated control for autonomous vehicles is fundamental to achieve safe and comfortable driving performance. Aiming at this for hybrid electric vehicles (HEV) during the car-following (CF) and lane-change (LC) process while accelerating, a hierarchical control strategy for vehicle stability control is proposed. This new approach is different from the conventional hierarchical control. On the basis of model predictive control (MPC) theory, a two-layer MPC controller is designed at the top level of the control structure. The upper layer is a linear time-varying MPC (LTV-MPC), while the lower layer is a hybrid MPC (HMPC). For the LTV-MPC controller, a control-oriented linear discrete model for HEV is established, which integrates the dynamic model with three degrees of freedom (DOF) and the car-following model. The lower-layer HMPC controller is designed on the basis of the analysis for HEV hybrid characteristics and the modelling for the mixed logic dynamic (MLD) model of the HEV powertrain. As for the bottom level, a control plant including the HEV powertrain model and the 7 DOF nonlinear dynamics of the vehicle body is established. In addition, the system stability is proven. A deep fusion of vehicle dynamics control and energy management is achieved. Compared with LC-ACC control and conventional ACC control, the simulation and the hardware-in-the-loop (HIL) test results under different driving scenarios show that the proposed hierarchical control strategy can effectively maintain lateral stability and safety under severe driving conditions. Additionally, the HEV powertrain output torque and the gear-shift point are coordinated and controlled by the HMPC controller.
Similar content being viewed by others

References
Li Y, Chen D. A learning-based comprehensive evaluation model for traffic data quality in intelligent transportation systems. Multimed Tools Appl, 2016, 75: 11683–11698
Lin T C, Ji S, Dickerson C E, et al. Coordinated control architecture for motion management in ADAS systems. IEEE/CAA J Autom Sin, 2018, 5: 432–444
Li Y, Zhao H, Zheng T, et al. Non-lane-discipline-based car-following model incorporating the electronic throttle dynamics under connected environment. Nonlinear Dyn, 2017, 90: 2345–2358
Xing Y, Lv C, Wang H, et al. Driver lane change intention inference for intelligent vehicles: Framework, survey, and challenges. IEEE Trans Veh Technol, 2019, 68: 4377–4390
Zhao Y, Ito D, Mizuno K. AEB effectiveness evaluation based on car-to-cyclist accident reconstructions using video of drive recorder. Traffic Injury Prevention, 2019, 20: 100–106
Wang X, Fu M, Ma H, et al. Lateral control of autonomous vehicles based on fuzzy logic. Control Eng Practice, 2015, 34: 1–17
Norouzi A, Kazemi R, Azadi S. Vehicle lateral control in the presence of uncertainty for lane change maneuver using adaptive sliding mode control with fuzzy boundary layer. Proc Inst Mech Eng Part I-J Syst Control Eng, 2018, 232: 12–28
Zhang X, Zhu X. Autonomous path tracking control of intelligent electric vehicles based on lane detection and optimal preview method. Expert Syst Appl, 2019, 121: 38–48
Li L, Lu Y, Wang R, et al. A three-dimensional dynamics control framework of vehicle lateral stability and rollover prevention via active braking with MPC. IEEE Trans Ind Electron, 2016, 64: 3389–3401
Li S, Li K, Rajamani R, et al. Model predictive multi-objective vehicular adaptive cruise control. IEEE Trans Control Syst Technol, 2011, 19: 556–566
Luo Y, Chen T, Zhang S, et al. Intelligent hybrid electric vehicle ACC with coordinated control of tracking ability, fuel economy, and ride comfort. IEEE Trans Intell Transp Syst, 2015, 16: 2303–2308
Cheng S, Li L, Mei M, et al. Multiple-objective adaptive cruise control system integrated with DYC. IEEE Trans Veh Technol, 2019, 68: 4550–4559
Dang R, Wang J, Li S E, et al. Coordinated adaptive cruise control system with lane-change assistance. IEEE Trans Intell Transp Syst, 2015, 16: 2373–2383
Wei S, Zou Y, Zhang X, et al. An integrated longitudinal and lateral vehicle following control system with radar and vehicle-to-vehicle communication. IEEE Trans Veh Technol, 2019, 68: 1116–1127
Wang J, Zheng H, Zong C. Longitudinal and lateral dynamics control of automatic lane change system. Trans Inst Meas Control, 2019, 41: 4322–4338
Peng T, Su L, Zhang R, et al. A new safe lane-change trajectory model and collision avoidance control method for automatic driving vehicles. Expert Syst Appl, 2020, 141: 112953
Liu D, Baldi S, Jain V, et al. Cyclic communication in adaptive strategies to platooning: The case of synchronized merging. IEEE Trans Intell Veh, 2020, 1
Heemels W P M H, de Schutter B, Bemporad A. Equivalence of hybrid dynamical models. Automatica, 2001, 37: 1085–1091
Sirmatel I I, Geroliminis N. Mixed logical dynamical modeling and hybrid model predictive control of public transport operations. Transp Res Part B-Meth, 2018, 114: 325–345
Ripaccioli G, Bemporad A, Assadian F, et al. Hybrid modeling, identification, and predictive control: An application to hybrid electric vehicle energy management. In: Proceedings of International Workshop on Hybrid Systems: Computation and Control. San Francisco, 2009. 321–335
Sun X, Zhang H, Cai Y, et al. Hybrid modeling and predictive control of intelligent vehicle longitudinal velocity considering nonlinear tire dynamics. Nonlinear Dyn, 2019, 97: 1051–1066
Moness M, Moustafa A M. Hybrid modelling and predictive control of utility-scale variable-speed variable-pitch wind turbines. Trans Inst Meas Control, 2020, 42: 1724–1739
Cabrera J, Castillo J, Pérez J, et al. A procedure for determining tire-road friction characteristics using a modification of the magic formula based on experimental results. Sensors, 2018, 18: 896
Bempora A, Garulli A, Paoletti S, et al. A bounded-error approach to piecewise affine system identification. IEEE Trans Autom Control, 2005, 50: 1567–1580
Ferrari-Trecate G, Muselli M, Liberati D, et al. A clustering technique for the identification of piecewise affine systems. Automatica, 2003, 39: 205–217
Torrisi F D, Bemporad A. HYSDEL—A tool for generating computational hybrid models for analysis and synthesis problems. IEEE Trans Contr Syst Technol, 2004, 12: 235–249
Cheng Y H, Lai C M. Control strategy optimization for parallel hybrid electric vehicles using a memetic algorithm. Energies, 2017, 10: 305–326
Maciejowksi J M. Predictive Control with Constraints. Upper Saddle River City: Prentice Hall, 2002. 167–185
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Natural Science Foundation of China (Grant Nos. 51975253 and 51905219), the Program of the Youth Natural Science Foundation of Jiangsu Province (Grant No. BK20200909), the Postdoctoral Science Foundation of China (Grant No. 2020M671381), and the Natural Science Research Project of Jiangsu Higher Education Institutions (Grant No. 19KJB580001).
Rights and permissions
About this article

Cite this article
Zhou, Y., Wang, R., Ding, R. et al. Investigation on hierarchical control for driving stability and safety of intelligent HEV during car-following and lane-change process. Sci. China Technol. Sci. 65, 53–76 (2022). https://doi.org/10.1007/s11431-021-1891-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-021-1891-8