
Abstract
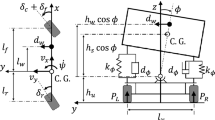
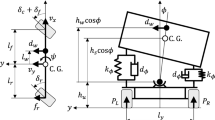
When a four in-wheel motors drive electric vehicle with a specific wheels mass is running on an uneven road and transient steering occurs in the meantime, the joint action of the large unsprung dynamic load and the centrifugal force may cause the vehicle to rollover. To avoid the above accident, a rollover prevention control method based on active distribution of the in-wheel motors driving torques is investigated. First, the rollover evolution process of the four in-wheel motors drive electric vehicle under the described operating condition is analyzed. Next, a multiple degrees of freedom vehicle dynamics model including an uneven road tyre model is established, and the rollover warning threshold is determined according to the load transfer ratio. Then, the hypothesis of the effects of unsprung mass on the vehicle roll stability on a plat road and on an uneven road is verified respectively. Finally, a rollover prevention controller is designed based on the distribution of the four wheels driving torques with sliding mode control, and the control effect is verified by simulations. The conclusion shows that, once the wheels mass does not match road conditions, the large unsprung mass may play a detrimental role on the vehicle roll stability on an uneven road, which is different from the beneficial role of large unsprung mass on the vehicle roll stability on a plat road. With the aforementioned rollover prevention controller, the vehicle rollover, which is caused by the coupling effect between large unsprung dynamic load and suspension potential energy on an uneven road, can be avoided effectively.
Similar content being viewed by others

References
Zhai L, Sun T, Wang J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle. IEEE Trans Veh Technol, 2016, 65: 4726–4739
Gu X J, Chen G, Zong C. Based on the unscented Kalman filter to estimate the state of four-wheel-independent electric vehicle with X-bywire. Continental Shelf Res, 2015, 8: 316–322
Nam K, Fujimoto H, Hori Y. Design of an adaptive sliding mode controller for robust yaw stabilisation of in-wheel-motor-driven electric vehicles. Int J Veh Des, 2015, 67: 98–113
Tan D, Lu C. The influence of the magnetic force generated by the in-wheel motor on the vertical and lateral coupling dynamics of electric vehicles. IEEE Trans Veh Technol, 2016, 65: 4655–4668
Luo Y, Tan D. Study on the dynamics of the in-wheel motor system. IEEE Trans Veh Technol, 2012, 61: 3510–3518
Rath J J, Defoort M, Veluvolu K C. Rollover index estimation in the presence of sensor faults, unknown inputs, and uncertainties. IEEE Trans Intell Transport Syst, 2016, 17: 2949–2959
Li L, Lu Y S, Wang R R, et al. A 3-dimentional dynamics control framework of vehicle lateral stability and rollover prevention via active braking with MPC. IEEE Trans Ind Electron, 2016, 99: 1–12
Her H, Koh Y, Joa E, et al. An integrated control of differential braking, front/rear traction, and active roll moment for limit handling performance. IEEE Trans Veh Technol, 2016, 65: 4288–4300
Licea M R, Cervantes I. Robust indirect-defined envelope control for rollover and lateral skid prevention. Control Eng Pract, 2017, 61: 149–162
Tan D, Wang H, Wang Q. Study on the rollover characteristic of in-wheel-motor-driven electric vehicles considering road and electromagnetic excitation. Shock Vib, 2016, 2016: 1–13
Wang Y Y, Li Y N, Sun W, et al. Effect of the unbalanced vertical force of a switched reluctance motor on the stability and the comfort of an in-wheel motor electric vehicle. Proc Inst Mech Eng D J Automob Eng, 2015, 229: 1569–1584
Vos R. Influence of in-wheel motors on the ride comfort of electric vehicles. Dissertation of Masteral Degree. Eindhoven: Eindhoven University of Technology, 2010
Kawashima K, Uchida T, Hori Y. Rolling stability control utilizing rollover index for in-wheel motor electric vehicle. IEEJ Trans IA, 2010, 130: 655–662
Murata S. Innovation by in-wheel-motor drive unit. Vehicle Syst Dyn, 2012, 50: 807–830
Katsuyama E. Decoupled 3D moment control using in-wheel motors. Vehicle Syst Dyn, 2013, 51: 18–31
Katsuyama E, Omae A. Improvement of ride comfort by unsprung negative skyhook damper control using in-wheel motors. SAE Int J Alt Power, 2016, 5: 214–221
Li Y, Sun W, Huang J, et al. Effect of vertical and lateral coupling between tyre and road on vehicle rollover. Vehicle Syst Dyn, 2013, 51: 1216–1241
Du H, Zhang N, Wang L. Switched control of vehicle suspension based on motion-mode detection. Vehicle Syst Dyn, 2014, 52: 142–165
Zhang L P, Li L, Qi B N, et al. High speed stability electromechanical coupling control for dual-motor distributed drive electric vehicle. J Mech Eng, 2015, 51: 29–40
Zhao W, Wang C, Li Y, et al. Integrated optimisation of active steering and semi-active suspension based on an improved Memetic algorithm. Int J Veh Des, 2015, 67: 388–405
Zhang L P, Li L, Qi B N. Decoupled roll stability control of in-wheel motor drive electric vehicle. J Mech Eng, 2017, 53: 94–104
Sivaramakrishnan S. Discrete tire modeling for anti-lock braking system simulations. Dissertation of Masteral Degree. Blacksburg: Virginia Polytechnic Institute and State University, 2013
Zuo S, Duan X, Wu X D. Modeling and analysis of rigid ring coupling model of electric wheel (in Chinese). J Tongji Univer, 2014, 42: 1578–1585
Tuononen A, Hartikainen L, Petry F, et al. Parameterization of in-plane rigid ring tire model from instrumented vehicle measurements. In: The International Symposium on Advanced Vehicle Control AVEC12. Seoul, 2012
Allen J, El-Gindy M, Koudela K. Development of a rigid ring quartervehicle model with an advanced road profile algorithm for durability and ride comfort predictions. In: ASME 2008 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Brooklyn, New York, 2008. 583–590
Schmeitz A J C. A semi-empirical three-dimensional model of the pneumatic tyre rollingover arbitrarily uneven road surfaces. Dissertation of Doctoral Degree. Delft: Delft University of Technology, 2004
Zegelaar P W A. The dynamic response of tyres to brake torque variations and road unevenesses. Dissertation of Doctoral Degree. Delft: Delft University of Technology, 1998
Li L, Jia G, Chen J, et al. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tyre forces. Vehicle Syst Dyn, 2015, 53: 1093–1116
Zhang L, Li L, Lin C, et al. Coaxial-coupling traction control for a four-wheel-independent-drive electric vehicle on a complex road. Proc Inst Mech Eng D J Automob Eng, 2014, 228: 1398–1414
Kang J, Yoo J, Yi K. Driving control algorithm for maneuverability, lateral stability, and rollover prevention of 4WD electric vehicles with independently driven front and rear wheels. IEEE Trans Veh Technol, 2011, 60: 2987–3001
Li L, Jia G, Ran X, et al. A variable structure extended Kalman filter for vehicle sideslip angle estimation on a low friction road. Vehicle Syst Dyn, 2014, 52: 280–308
Lin C, Xu Z. Wheel torque distribution of four-wheel-drive electric vehicles based on multi-objective optimization. Energies, 2015, 8: 3815–3831
Lin C, Dong A, Shi J. Dynamic smoothness control for dual-motor-independent-drive electric vehicles based on kalman filter. Energ Procedia, 2016, 88: 1005–1012
Duan T T, Wang C Y, Zhao W Z, et al. Sliding mode-PID control of driving system for motorized wheels vehicle (in Chinese). Jiangsu Daxue Xuebao, 2015, 36: 260–264
Yu Z, Leng B, Xiong L, et al. Direct yaw moment control for distributed drive electric vehicle handling performance improvement. Chin J Mech Eng, 2016, 29: 486–497
Alberding M B, Tjønnås J, Johansen T A. Integration of vehicle yaw stabilisation and rollover prevention through nonlinear hierarchical control allocation. Vehicle Syst Dyn, 2014, 52: 1607–1621
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, L., Li, L. & Qi, B. Rollover prevention control for a four in-wheel motors drive electric vehicle on an uneven road. Sci. China Technol. Sci. 61, 934–948 (2018). https://doi.org/10.1007/s11431-017-9150-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-017-9150-2