
Abstract
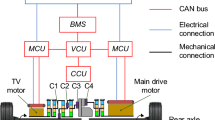
As an important development direction of pure electric vehicle drive system, the distributed drive system has the advantages of compact structure, high transmission efficiency, and flexible control, but there are some serious problems such as high performance requirements to the drive motors, complex control strategies, and poor reliability. To solve these problems, a two motors dual-mode coupling drive system has been developed at first, which not only has the capacity of two-speed gear shifting, but also can automatically switch between the distributed drive and the centralized drive by means of modes change control. So, the performance requirements to the drive motors can be reduced, the problem of abnormal running caused by the fault of unilateral distributed drive systems also can be resolved by replacing the drive mode with centralized drive. Then, the system parameters primary and the optimum matching under the principle of efficiency optimization have been carried out, which makes the drive system achieve predetermined functions and meet the actual demands of different operating statuses. At last, the economic comparison of a pure electric vehicle installation with a dual-mode coupling drive system, a single-motor centralized drive system or a dual-motor distributed drive system in the simulation conditions has been completed. Compared with other systems, the driving range of the electric vehicle driven by the designed system is significantly increased, which proves the better efficiency and application value of the system.
Similar content being viewed by others

References
Zhu H, Li L, Jin M, et al. Real-time yaw rate prediction based on a non-linear model and feedback compensation for vehicle dynamics control. Proc I Mech E Part D: J Aut, 2013, 227: 1431–1445
Murata S. Innovation by in-wheel-motor drive unit. Vehicle Syst Dyn, 2012, 50: 807–830
Dadashnialehi A, Bab-Hadiashar A, Cao Z W, et al. Intelligent sensorless ABS for in-wheel electric vehicles. IEEE T Ind Electron, 2014, 61: 1957–1969
Hori Y. Future vehicle driven by electricity and control-research on 4 wheels motored “UOT March II”. IEEE T Ind Electron, 2004, 51: 954–96
Wang J N, Wang Q N, Jin L Q, et al. Independent wheel torque control of 4WD electric vehicle for differential drive assisted steering. Mechatronics, 2011, 21: 63–76
Zhao W Z, Xu X H, Wang C Y. Multidiscipline collaborative optimization of differential steering system of electric vehicle with motorized wheels. Sci China Tech Sci, 2012, 55: 3462–3468
Xiong L, Yu Z P, Wang Y, et al. Vehicle dynamics control of four in wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation. Vehicle Syst Dyn, 2012, 50: 831–846
Wang R R, Wang J M. Fault-tolerant control with active fault diagnosis for four-wheel independently driven electric ground vehicles. IEEE T Veh Technol, 2011, 60: 4276–4287
Chu W B, Luo Y G, Han Y W, et al. Rule-based traction system failure control of distributed electric drive vehicle. J Mech Eng, 2012, 48: 90–95, 102
Mutoh N, Nakano Y. Dynamics of front-and-rear-wheel-independent-drive-type electric vehicles at the time of failure. IEEE T Ind Electron, 2012, 59: 1488–1499
Zhang L P, Lin C, Qi B N. Mechanism and design of EV changing modes propulsion system. In: Bilof R, eds. International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 2009. 91–94
Zhang L P, Qi B N, Lin C. Torque behavior of electric vehicle change mode drive system. In: Guerrero J E, ed. International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 2010. 87–90
Nagaya G, Wakao Y, Abe A. Development of an in-wheel drive with advanced dynamic-damper mechanism. JSAE Review, 2003, 24: 477–481
Yang C, Jiao X H, Li L, et al. Electromechanical coupling drive control for single-shaft parallel hybrid powertrain. Sci China Tech Sci, 2014, 57: 541–549
Yu Z S. Theory of Automobile. Beijing: Machinery Industry Press, 2009. 75
Chiasson J, Vairamohan B. Estimating the state of charge of a battery. IEEE T Cont Syst T, 2005, 13: 465–470
Goldberg D E, Holland J H. Genetic Algorithms and Machine Learning, Machine Learning 3. Dordrecht: Kluwer Academic Publishers, 1988. 95–99
Zhao W Z, Wang C Y. Mixed H2/H∞ road feel control of EPS based on genetic algorithm. Sci China Tech Sci, 2012, 55: 72–80
Leung Y W, Wang Y P. An orthogonal genetic algorithm with quantization for global numerical optimization. IEEE T Evol Comput, 2001, 5: 41–53
Sadjadi F A. Comparison of fitness scaling functions in genetic algorithms with applications to optical processing. Proc SPIE, 2004, 5557: 356–364
Montazeri-Gh M, Poursamad A, Ghalichi B. Application of genetic algorithm for optimization of control strategy in parallel hybrid electric vehicles. J Franklin Institute, 2006, 343: 420–435
Nada M, Al-Salami A. Ant colony optimization algorithm. UbiCC J, 2009, 4: 823–826
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, L., Li, L., Qi, B. et al. Parameters optimum matching of pure electric vehicle dual-mode coupling drive system. Sci. China Technol. Sci. 57, 2265–2277 (2014). https://doi.org/10.1007/s11431-014-5651-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-014-5651-9