
Abstract
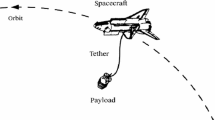
In recent years, defunct satellites mitigation in the geostationary orbit (GEO) has become a hot issue in the space field. How to transfer defunct geostationary satellites to the graveyard orbit safely, economically and efficiently presents new challenges to spacecraft dynamics and control. This paper conducts an in-depth investigation on tether-tugging de-orbit issues of defunct geostationary satellites. Firstly, a four-phase tether-tugging de-orbit scheme including acceleration, equilibrium, rotation and return is proposed. This scheme takes into consideration how to avoid the risks of tether ripping, tug-target collision, and tether twist, and how to achieve the mission objective of fuel saving. Secondly, the dynamics model of the tether combination system is established based on Lagrange equation, and the four phases of tether-tugging de-orbit scheme are simulated respectively. Simulation results indicate that the scheme is theoretically feasible and satisfies the design objectives of safety, economy and efficiency, providing a technical approach for engineering application.
Similar content being viewed by others

References
Nascimento J M. Hazard evaluation of the space debris in the geostationary orbit. In: Proceedings of AAS/AIAA Astrodynamics Specialist Conference. Pittsburgh: Univelt Inc., 2010
Smith D A, Martin C, Kassebom M, et al. A mission to preserve the geostationary region. Adv Space Res, 2004, 34: 1214–1218
Pearson J, Carroll J, Levin E. Active debris removal: EDDE, the electrodynamic debris eliminator. In: Proceedings of 61st International Astronautical Congress. Prague: IAC, 2010
Li Y H, Yang K Z, Shan C S, et al. A preliminary study on dead geostationary satellite removal. Sci China Tech Sci, 2010, 53: 3389–3396
Bremen A S. Robotic Geostationary Orbit Restorer (ROGER) Phase A Final Report. ESA Contract No.: 15706/01/NL/WK, 2003
Zhai G, Qiu Y, Liang B, et al. On-orbit capture with flexible tether-net system. Acta Astronaut, 2009, 65(5–6): 613–623
Chen Q, Yang L P. On dynamics of casting a net structure of flexible cables on orbit. In: Proceedings of the 60th International Astronautical Congress. Daejeon: AIAA, 2009
Yu Y, Baoyin H X, Li J F. Dynamic modelling and analysis of space webs. Sci China Phys Mech Astron, 2011, 54(4): 783–791
Chen Q. Design and Dynamics of an Orbital Net-Capture System (in Chinese). Dissertation of Doctoral Degree. Changsha: National University of Defense Technology, 2010
Ishige Y, Kawamoto S, Kibe S. Study on electrodynamic tether system for space debris removal. Acta Astronaut, 2004, 55(11): 917–929
Williams P. Optimal control of electrodynamic tether orbit transfers using timescale separation. J Guid Control Dynam, 2010, 33(1): 88–98
Lorenzini E C, Cosmo M L, Kaiser M, et al. Mission analysis of spinning systems for transfers from low orbits to geostationary. J Spacecraft Rockets, 2000, 37(2): 165–172
Kumar K D, Yasaka T, Sasaki T. Orbit transfer of service vehicle/payload through tether retrieval. Acta Astronaut, 2004, 54(9): 687–698
Williams P. Tether capture and momentum exchange from hyperbolic orbits. J Spacecraft Rockets, 2007, 47(1): 205–209
Sun L, Zhao G W, Huang H, et al. Tether-dragging maneuver strategy and tether control method. In: Proceedings of 2010 Asia-Pacific International Symposium on Aerospace Technology, 2010
Ellis J R. Modeling, Dynamics, and Control of Tethered Satellite Systems. Dissertation of Masteral Degree. Blacksburg: Virginia Polytechnic Institute and State University, 2010
Inter-Agency Space Debris Cordination Committee. IADC Space Debris Mitigation Guidelines, IADC-02-01 Revision 1, 2007
Zhu Y W. Trajectory Planning and Control for Spacecraft Proximity Relative Motion (in Chinese). Dissertation of Doctoral Degree. Changsha: National University of Defense Technology, 2009
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Liu, H., Yang, L., Zhang, Q. et al. An investigation on tether-tugging de-orbit of defunct geostationary satellites. Sci. China Technol. Sci. 55, 2019–2027 (2012). https://doi.org/10.1007/s11431-012-4878-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-012-4878-6