
Abstract
Disturbance observer (DOB) is widely used in many practical applications due to its simple structure and high performance. However, the DOB cannot be directly applied to the robotic systems because of the nonlinearities/couplings in the inertia matrix (by means of coupling, we mean off-diagonal terms of the inertia matrix). This paper proposes a momentum-based DOB for general rigid joint robotic systems. By introducing the generalized momentum, it is possible to utilize full nonlinearities and couplings of the inertia matrix in the DOB design. Moreover, the momentum-based DOB design for the rigid joint robots can be easily extended to the flexible joint robot applications by applying it to the link-side dynamics and motor-side dynamics, respectively. As a result, we can estimate the external torque acting on the link-side and can compensate the disturbance occurring in the motor-side at the same time. Uniformly ultimated boundedness of the closed-loop dynamics can be shown through the Lyapunov-like approaches. The proposed scheme is verified using the numerical simulations.







Similar content being viewed by others


Notes
\(Q(s)\) should be designed to make \(Q(s)G_{n}(s)^{-1}\) proper. In the implementation, one has to implement \(Q(s)\) and \(Q(s)G_{n}(s)^{-1}\).
Fig. 1 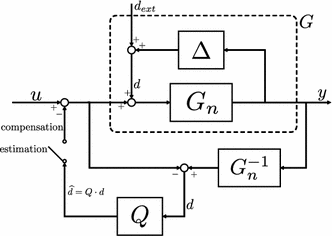
Structure of the standard DOB. The resulting transfer function from input \(u\) to \(y\) is \(G_{n}\) in low-frequency region if \(Q\) is designed as a low-pass filter
Here, although \(L\) is a matrix, it is treated like a scalar value for simplicity of writing. However, no confusion occurs because \(L\) is a diagonal matrix.
It should be noted that the definition of \(A_{ss}\), \(B_{ss}\), and the state \(x\) may differ depending on the controller. For example, if a PID tracking control is of interest, \(x\) will be defined by \(x=[\int e \;\; e \;\; \dot{e}]\), where \(e \triangleq q_{d} - q\) with properly redefined \(A_{ss}\) and \(B_{ss}\). Nevertheless, the proposed momentum-based DOB can be applied seamlessly.
As a matter of fact, in this case, we can assume \(\dot{\tau }_{d}=0\). In this case, we can always prove the asymptotic stability (\(x\) and \(\tau _{d}-\widehat{\tau }_{d}\) converge to zero).

References
Chen WH (2004) Disturbance observer based control for nonlinear systems. IEEE/ASME Trans Mechatron 9(4):706–710
Choi Y, Yang K, Chung WK, Kim HR, Suh IH (2003) On the robustness and performance of disturbance observers for second order systems. IEEE Trans Autom Control 48(2):315–320
De Luca A, Guglielmelli E, Dario P (2005) Compliance control for an anthropomorphic robot with elastic joints: theory and experiments. J Dyn Syst Meas Control 127(3):321–328
De Luca A, Mattone R (2003) Actuator failure detection and isolation using generalized momenta. In: IEEE/RSJ international conference on intelligent robots and systems (IROS), vol 1, pp 634–639
De Wit CC, Bastin G, Siciliano B (1996) Theory of robot control. Springer, New York
Erden MS, Tomiyama T (2010) Human-intent detection and physically interactive control of a robot without force sensors. IEEE Trans Robot 26(2):370–382
Haddadin S, Albu-Schaffer A, De Luca A, Hirzinger G (2008) Collision detection and reaction: a contribution to safe physical human-robot interaction. In: IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 3356–3363
Jeong U, In HK, Cho KJ (2013) Implementation of various control algorithms for hand rehabilitation exercise using wearable robotic hand. Intell Serv Robot 6(4):181–189
Kim BK, Choi HT, Chung WK, Suh IH (2002) Analysis and design of robust motion controllers in the unied framework. Trans ASME J Dyn Syst Meas Control 124(2):313–320
Kim MJ, Chung WK (2014) Robust control of flexible joint robots based on motor-side dynamics reshaping using disturbance observer (dob). In: IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 2381–2388
Kugi A, Ott C, Albu-Schaffer A, Hirzinger G (2008) On the passivity-based impedance control of flexible joint robots. IEEE Trans Robot 24(2):416–429
Magrini E, Flacco F, De Luca A (2014) Estimation of contact forces using a virtual force sensor. In: IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 2126–2133
Massera JL (1956) Contributions to stability theory. Ann Math 64(1):182–206
Mohammadi A, Tavakoli M, Marquez H, Hashemzadeh F (2013) Nonlinear disturbance observer design for robotic manipulators. Control Eng Pract 21(3):253–267
Nikoobin A, Haghighi R (2009) Lyapunov-based nonlinear disturbance observer for serial n-link robot manipulators. J Intell Robot Syst 55(2–3):135–153
Oh Y, Chung WK (1999) Disturbance-observer-based motion control of redundant manipulators using inertially decoupled dynamics. IEEE/ASME Trans Mechatron 4(2):133–146
Ohnishi K (1987) A new servo method in mechatronics. Trans Jpn Soc Electr Eng 107:83–86
Ott C, Henze B, Lee D (2013) Kinesthetic teaching of humanoid motion based on whole-body compliance control with interaction-aware balancing. In: IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 4615–4621
Park Y, Chung WK (2014) External torque-sensing algorithm for flexible-joint robot based on disturbance observer structure. In: IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 4735–4741
Spong MW (1990) Modeling and control of elastic joint robots. ASME J Dyn Syst Meas Control 109:310–319
Tomei P (1991) A simple PD controller for robots with elastic joints. IEEE Trans Autom Control 36(10):1208–1213
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIP) (No. 2011-0030075).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kim, M.J., Park, Y.J. & Chung, W.K. Design of a momentum-based disturbance observer for rigid and flexible joint robots. Intel Serv Robotics 8, 57–65 (2015). https://doi.org/10.1007/s11370-014-0163-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-014-0163-9