
Abstract
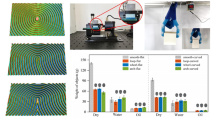
Flexible surface textures are often utilized in the design of robots that need to manipulate objects requiring a strong frictional force. In this study, we designed and prepared flexible silicone rubber films with surface textures inspired by groove patterns found at the tips of human fingers. These designs included loop, whorl, and arch patterns, as well as horizontal and vertical stripe textures as a control group. On the basis of surface morphology analysis, we established a relative sliding test platform to collect coefficient of friction (COF) through relative sliding tests of soft surface textures and rigid plane contact pairs. The friction coefficient guides the characterization of the contact properties in the finite element simulation process. According to the results of friction testing, the loop, whorl, and horizontal stripe exhibit a higher friction coefficient under variable contact stress, while the arch and vertical stripe display a lower coefficient. The variation patterns of the contact surfaces between a rigid surface and five distinct types of soft surface textures were analyzed by simulating the friction process using Abaqus explicit dynamic analysis. The deformation of the soft surface textures under different contact stresses is subsequently described in terms of elastic strain energy. Compared to the vertical stripe texture, loop, whorl, and arch exhibit greater recoverable strain energy during the relative sliding stage, which means a larger average elastic displacement. Subsequently, different soft surface textures are integrated onto the fingertip of a soft robotic hand, and the grasping ability is evaluated within lubrication-related medical scenarios. The texture perpendicular to the movement direction exhibits a higher friction-producing capability compared to the texture aligned parallel to it. Due to the intricate surface texture patterns, it demonstrates greater adaptability for relative motion in all directions. This research proposes a soft robotic hand incorporating a surface texture resembling fingerprint-like surface texture. By employing experimentation and finite element simulation, this study utilizes surface engineering design to comprehend the contact characteristics involved in the grasping process of a soft robotic hand.
Graphical abstract











Similar content being viewed by others


Data Availability
All the data in this paper are obtained from experiments. The data that support the findings of this study are available from the corresponding author Huaping Xiao upon reasonable request.
References
Langowski, J.K.A., Sharma, P., Shoushtari, A.L.: In the soft grip of nature. Sci. Robot. 5, eabd9120 (2020)
Jiang, Z., Shen, M., Ma, Y., Che, J., Li, H.: Design and fabrication of a gecko-inspired surface for improving the grasping ability of a humanoid dexterous hand. Sci. China Technol. Sci. 66, 784–792 (2023)
Li, Y., Krahn, J., Menon, C.: Bioinspired dry adhesive materials and their application in robotics: a review. J. Bionic Eng. 13, 181–199 (2016)
Xu, K., Zi, P., Ding, X.: Learning from biological attachment devices: applications of bioinspired reversible adhesive methods in robotics. Front. Mech. Eng. 17, 43 (2022)
Hwang, G.W., Lee, H.J., Kim, D.W., Yang, T.-H., Pang, C.: Soft microdenticles on artificial octopus sucker enable extraordinary adaptability and wet adhesion on diverse nonflat surfaces. Adv. Sci. 9, 2202978 (2022)
Hwang, G.W., Jeon, S.H., Song, J.H., Kim, D.W., Lee, J., Kim, J.-I., Jo, G., Park, S., Kim, H.J., Kim, M.-S., Yang, T.-H.: A spatially selective electroactive-actuating adhesive electronics for multi-object manipulation and adaptive haptic interaction. Adv. Funct. Mater. 34, 2308747 (2023)
Hao, Y., Biswas, S., Hawkes, E.W., Wang, T., Zhu, M., Wen, L., Visell, Y.: A multimodal, enveloping soft gripper: shape conformation, bioinspired adhesion, and expansion-driven suction. IEEE Trans. Robot. 37, 350–362 (2021)
Hao, Y., Visell, Y.: Beyond soft hands: efficient grasping with non-anthropomorphic soft grippers. Front. Robot. AI 8, 632006 (2021)
Hao, Y., Wang, Z., Zhou, Y., Zhou, W., Cai, T., Zhang, J., Sun, F.: A soft enveloping gripper with enhanced grasping ability via morphological adaptability. Adv. Intell. Syst. 5, 2200456 (2023)
Li, M.S., Melville, D., Chung, E., Stuart, H.S.: Milliscale features increase friction of soft skin in lubricated contact. IEEE Robot. Autom. Lett. 5, 4781–4787 (2020)
Guo, M., Gealy, D.V., Liang, J., Mahler, J., Goncalves, A., McKinley, S., Ojea, J., Goldberg, K.: Design of parallel-jaw gripper tip surfaces for robust grasping. In: 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, pp. 2831–2838 (2017)
Nadeau, P., Abbott, M., Melville, D., Stuart, H.S.: Tactile sensing based on fingertip suction flow for submerged dexterous manipulation. In: 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, pp. 3701–3707 (2020)
Mizushima, K., Suzuki, Y., Tsuji, T., Watanabe, T.: Deformable fingertip with a friction reduction system based on lubricating effect for smooth operation under both dry and wet conditions. Adv. Robot. 33, 508–519 (2019)
Watanabe, T., Morino, K., Asama, Y., Nishitani, S., Toshima, R.: Variable-grasping-mode gripper with different finger structures for grasping small-sized items. IEEE Robot. Autom. Lett. 6, 5673–5680 (2021)
Nishimura, T., Suzuki, Y., Tsuji, T., Watanabe, T.: Fluid pressure monitoring-based strategy for delicate grasping of fragile objects by a robotic hand with fluid fingertips. Sensors 4, 782 (2019)
Song, H., Wang, M.Y., Hang, K.: Fingertip surface optimization for robust grasping on contact primitives. IEEE Robot. Autom. Lett. 3, 742–749 (2018)
Schleifer, J., Marthelot, J., Jones, T.J., Brun, P.T.: The fingerprint of a flow: wrinkle patterns in nonuniform coatings on pre-stretched soft foundations. Soft Matter 15, 1405–1412 (2019)
van Kuilenburg, J., Masen, M.A., van der Heide, E.: A review of fingerpad contact mechanics and friction and how this affects tactile perception. Proc. Inst. Mech. Eng. J.: J. Eng. Tribol. 229, 243–258 (2013)
Hao, T., Xiao, H., Liu, S., Liu, Y.: Fingerprint-inspired surface texture for the enhanced tip pinch performance of a soft robotic hand in lubricated conditions. Friction 11, 1349–1358 (2023)
Kareklas, K., Nettle, D., Smulders, T.V.: Water-induced finger wrinkles improve handling of wet objects. Biol. Lett. 9, 20120999 (2013)
Cao, Y., Li, T., Gu, Y., Luo, H., Wang, S., Zhang, T.: Fingerprint-inspired flexible tactile sensor for accurately discerning surface texture. Small 14, 1703902 (2018)
Lei, Z., Wang, Q., Sun, S., Zhu, W., Wu, P.: A bioinspired mineral hydrogel as a self-healable, mechanically adaptable ionic skin for highly sensitive pressure sensing. Adv. Mater. 29, 1700321 (2017)
Li, Y., Cao, Z., Li, T., Sun, F., Bai, Y., Lu, Q., Wang, S., Yang, X., Hao, M., Lan, N., Zhang, T.: Highly selective biomimetic flexible tactile sensor for neuroprosthetics. Research 2020, 8910692 (2020)
Whitesides, G.M.: Soft robotics. Angew. Chem. Int. Edit. 57, 4258–4273 (2018)
Gorissen, B., Reynaerts, D., Konishi, S., Yoshida, K., Kim, J.W., De Volder, M.: Elastic inflatable actuators for soft robotic applications. Adv. Mater. 29, 1604977 (2017)
Laschi, C., Mazzolai, B., Cianchetti, M.: Soft robotics: technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 1, eaah3690 (2016)
Funding
This study was funded by the Beijing Natural Science Foundation (No. 3232013).
Author information
Authors and Affiliations
Contributions
TH contributed toward experiment and writing original draft, HX contributed toward resource supply, JW contributed toward writing guide, XW contributed toward experimental instruction, SL contributed toward partial figure plotting, QL contributed toward partial experimental test.
Corresponding authors
Ethics declarations
Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Hao, T., Xiao, H., Wang, J. et al. Friction Enhancement Through Fingerprint-like Soft Surface Textures in Soft Robotic Grippers for Grasping Abilities. Tribol Lett 72, 47 (2024). https://doi.org/10.1007/s11249-024-01848-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11249-024-01848-2