
Abstract
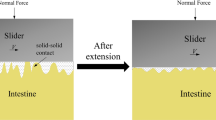
The information on the frictional resistance of a self-propelled robotic capsule endoscope moving inside the body is very important for the design and the performance enhancement of such parameters of the capsule endoscope as power consumption, motion control and positioning accuracy. Based on this motivation, the ultimate goal of this research was to develop an analytical model that can predict the frictional resistance of the capsule endoscope moving inside the living body. In this work, experimental investigations of the fundamental frictional characteristics and the viscoelastic behaviors of the small intestine were performed by using custom-built testers and various capsule dummies. The small intestine of a pig was used for the experiments. Experimental results showed that the average frictional force was 10–50 mN and higher moving speed of the capsule dummy resulted in larger frictional resistance of the capsule. In addition, the friction coefficient did not change significantly with respect to the apparent area of contact between the capsule dummy and the intestine, and also the friction coefficients decreased with an increase in the normal load and varied from 0.08 to 0.2. Such frictional behaviors could be explained by the lubrication characteristics of the intestine surface and typical viscoelastic characteristics of the small intestine material. Also, based on the experimental results, a viscoelasticity model for the stress relaxation of the small intestine could be derived.











Similar content being viewed by others
Abbreviations
- F :
-
Friction force (N)
- μ :
-
Friction coefficient
- N :
-
Normal force applied to the capsule (N)
- σ(t) :
-
Stress applied to the small intestine (Pa, N/m2)
- ε 0 :
-
Strain applied to the small intestine
- t :
-
Time (s)
- E 1, E 2, E 3 :
-
Elastic modulus of spring (Pa, N/m2)
- η1, η2 :
-
Viscosity of fluid in dashpot (Pa s)
References
Howe R.D., Matsuoka Y. (1999) Annu. Rev. Biomed. Eng. 1: 211
Iddan G., Meron G., Glukhovsky A., Swain P. (2000) Nature 405:417
Fleischer D.E. (2002) Gastrointest. Endosc. 56: 452
Peirs J., Reynaerts D., Van Brussel H. (2000) Sens. Actuator A-Phys. 85: 409
Kim B., Lee S., Park J.H., Park J.O. (2005) IEEE-ASME Trans. Mechatron. 10: 77
Dario P., Ciarletta P., Menciassi A., Kim B. (2004) Int. J. Robot. Res. 23: 549
Meyer E., Overney R.M., Dransfeld K., Gyalog T. (1998) Nanoscience World Scientific Publishing Co., Singapore
Baek N.K., Sung I.H., Kim D.E. (2004) Proc. Inst. Mech. Eng. Part H – J. Eng. Med. 218: 193
Miller E.R., Ullrey D.E. (1987) Ann. Rev. Nutr. 7: 361
Ravelingien A. (2005) Xenotransplantation 12: 235
Martini F.H. (1995) Fundamentals of Anatomy & Physiology Prentice Hall, New Jersey
Marieb E. (1998) Human Anatomy & Physiology Menlo Park, California
Fung Y.C. (1993) Biomechanics: Mechanical Properties of Living Tissues Springer-Verlag, New York
Anderson J., Li Z., Goubel F. (2002) J. Biomech. 35: 1315
Lakes R.S. (1999) Viscoelastic Solids CRC Press, Boca Raton, Florida
Pioletti D.P., Rakotomanana L.R. (2000) Eur. J. Mech. A-Solids 19: 749
Flugge W. (1975) Viscoelasticity Springer-Verlag, Berlin
Findley W.N., Lai J.S. (1989) Creep and Relaxation of Nonlinear Viscoelastic Materials Dover Publications, New York
J.S. Kim, I.H. Sung, Y.T. Kim, D.E. Kim and Y.H. Jang, Med. Eng. Phys. (submitted)
Acknowledgments
This research has been supported by the Intelligent Microsystem Center (IMC; http://www.microsystem.re.kr), which carries out one of the 21st Century’s Frontier R&D Projects sponsored by the Korea Ministry of Commerce, Industry and Energy.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kim, JS., Sung, IH., Kim, YT. et al. Experimental investigation of frictional and viscoelastic properties of intestine for microendoscope application. Tribol Lett 22, 143–149 (2006). https://doi.org/10.1007/s11249-006-9073-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-006-9073-0