
Abstract
Quadratic voting and the normalized gradient addition mechanism are both social choice mechanisms that confront individuals with quadratic budget constraints, but they are applicable in different contexts. Adapting one or both to apply to the same context, this paper explores the relationship between these two mechanisms in three contexts: marginal adjustments of continuous policies, simultaneous voting on many public choices, and voting on a single public choice accompanied by private monetary consequences. In the process, we provide some formal analysis of quadratic voting when (instead of money) votes are paid for with abstract tokens that are equally distributed by the mechanism designer.








Similar content being viewed by others


Notes
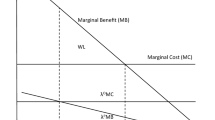
Using this setup, it is straightforward to calculate the gradients and indifference curves for each individual. Setting the right angle of the triangle as the origin, the horizontal movement of the mechanism is \(x_{1}=\frac{\sqrt{2}}{2}(w_{2}-w_{1})\) and the vertical movement is \(x_{2}=\frac{-\sqrt{2}}{2}(w_{1}+w_{2})\), where \(w_{1}\) and \(w_{2}\) are the wealth for person 1 and person 2, respectively. Then, we have the money-metric utility for person 1 as \(U_{1}=\frac{u_{1}}{c}-\frac{\sqrt{2}}{2}x_{1}+\frac{\sqrt{2}}{2}(\frac{2u_{1}}{c}-1)x_{2}\), where \(u_{1}\) is her valuation of the public good, \(x_{1}\) is the horizontal distance, and \(x_{2}\) is the vertical distance. From this utility function, the gradient is \(\nabla {\varvec{U}}_{1}=\frac{\sqrt{2}}{2}(-1,\frac{2u_{1}}{c}-1)\), and the indifference curve is \(x_{2}=\frac{\sqrt{2}U_{1}-\frac{2u_{1}}{c}+x_{1}}{\frac{2u_{1}}{c}-1}\).
References
Arrow, K. J. (1950). A difficulty in the concept of social welfare. The Journal of Political Economy, 58(4), 328–346.
Benjamin, D. J., Carroll, G., Heffetz, O., Kimball, M. S., & Lougee, D. (2016). Aggregating local preferences to guide policy. Cornell University and University of Southern California mimeo.
Benjamin, D. J., Heffetz, O., Kimball, M. S., & Szembrot, N. (2013). Aggregating local preferences to guide marginal policy adjustments. American Economic Review, 103(3), 605–610.
Benjamin, D. J., Heffetz, O., Kimball, M. S., & Szembrot, N. (2014). Beyond happiness and satisfaction: Toward well-being indices based on stated preference. American Economic Review, 104(9), 2698–2735.
Cárdenas, J. C., Mantilla, C., & Zárate, R. D. (2014). Purchasing votes without cash: Implementing quadratic voting outside the lab. https://www.aeaweb.org/aea/2015conference/program/retrieve.php?pdfid=719.
Chung, H. & Duggan, J. (2015). Directional equilibria. University of Rochester mimeo.
Finkelstein, A., Taubman, S., Wright, B., Bernstein, M., Gruber, J., Newhouse, J. P., et al. (2012). The oregon health insurance experiment: Evidence from the first year. The Quarterly Journal of Economics, 127(3), 1057–1106.
Gibbard, A. (1973). Manipulation of voting schemes: A general result. Econometrica, 41(4), 587–601.
Goeree, J. K. & Zhang, J. (2016). One man, one bid. Quadratic voting and the public good conference.
Groves, T., & Ledyard, J. (1977). Optimal allocation of public goods: A solution to the “free rider” problem. Econometrics, 45(4), 783–808.
Helliwell, J., Layard, R., & Sachs, J. (Eds.). (2015). World happiness report. Columbia University: The Earth Institute.
Hylland, A., & Zeckhauser, R. (1980). A mechanism for selecting public goods when preferences must be elicited. Kennedy School of Government discussion paper D.
Hylland, A., Zeckhauser, R., & Weyl, E. G. (2016). An efficient competitive economy with public goods. Contact Glen Weyl (glenweyl@microsoft.com).
Kaplow, L., & Kominers, S. D. (2016). Who will vote quadratically? Voter turnout and votes case under quadratic voting. Quadratic voting and the public good conference.
Lalley, S. P. & Weyl, E. G. (2016). Quadratic voting. SSRN: http://ssrn.com/abstract=2003531.
Laurence, B., & Sher, I. (2016). Ethical considerations on quadratic voting. Quadratic voting and the public good conference.
Ludwig, J., Duncan, G. J., Gennetian, L. A., Katz, L. F., Kessler, R. C., Ling, J. R., et al. (2012). Neighborhood effects on the long-term well-being of low-income adults. Science, 337(6101), 1505–1510.
OECD. (2016). Measuring well-being and progress: Well-being research. http://www.oecd.org/statistics/measuring-well-being-and-progress.htm.
Quarfoot, D., von Kohorn, D., Slavin, K., Sutherland, R., & Konar, E. (2016). Quadratic voting in the wild: Real people, real votes. Quadratic voting and the public good conference.
Satterthwaite, M. A. (1975). Strategy-proofness and arrow’s conditions: Existence and correspondence theorems for voting procedures and social welfare functions. Journal of Economic Theory, 10(2), 187–217.
Weyl, E. G. (2015). The efficiency of quadratic voting in finite populations. SSRN: http://ssrn.com/abstract=2571026.
Weyl, E. G. (2016). The robustness of quadratic voting. SSRN: http://ssrn.com/abstract=2571012.
Acknowledgements
The authors would like to thank Glen Weyl for multiple rounds of detailed editorial feedback that significantly improved the paper; Itai Sher, Gabriel Carroll, and participants in the Becker-Friedman Institute’s “Quadratic Voting and the Public Good” conference for helpful comments and suggestions; and Assaf Kott and especially Rebecca Royer for excellent research assistance.
Author information
Authors and Affiliations
Corresponding author
Appendix: Proofs
Appendix: Proofs
1.1 Proofs from Sect. 6.4 (efficiency)
Theorem 4
Denote by \(S_{n}\) an ellipsoid whose axis in the z dimension is squished by a factor of \(\sqrt{n}\): \(S_{n}=\{(z,{\mathbf {w}})\in {\mathbb {R}}^{1+\varTheta }:nz^{2}+w_{1}^{2}+\cdots +w_{\varTheta }^{2}\le 1\}\). Let \(z_{\theta }(n)\) denote \(\theta \)’ s optimal contribution to the public good when the choice set is \(S_{n}\). Then, \(z_{\theta }(n)\rightarrow 0\) as \(n\rightarrow \infty \) and \(z_{\theta }(n)/z_{\theta '}(n)\rightarrow u_{\theta }/u_{\theta '}\) as \(n\rightarrow \infty \).
Proof
From the perspective of type \(\theta \), the relevant constraint is in fact \(nz^{2}+w_{\theta }^{2}=1\). From (2), type \(\theta \) faces the following optimization problem:
subject to \(nz_{\theta }^{2}+s_{\theta }^{2}=1\), where \(z_{\theta }=\sum _{{\hat{\theta }}\not =\theta }z_{{\hat{\theta }}}\). Using \(s_{\theta }=\sqrt{1-nz_{\theta }^{2}}\), the relevant first-order condition is
where \(\psi \equiv \varPsi '\).
Recall that \(\varepsilon >0\) is assumed to be sufficiently small so that \(\psi (2\Delta z/c)\approx \psi (0)\), where \(\Delta z=\frac{\varepsilon }{\varTheta }\sum _{\theta }z_{\theta }\). That is, we can treat \({\bar{\psi }}\equiv \frac{2}{c}\psi (0)\) as a constant. This allows us to solve (5) as a quadratic equation:
As n becomes large, the \(n^{2}\) term in the denominator of (6) dominates. Thus for n sufficiently large, \(z_{\theta }(n)\rightarrow 0\) is approximately proportional to \(u_{\theta }\). To be precise,
as \(n\rightarrow \infty \).\(\square \)
Corollary 2
The quadratic approximation in (3) is asymptotically valid as \(n\rightarrow \infty \).
Proof
Recall that the exact relationship in (3) is given by the Taylor expansion
where \(R_{4}\) is the remainder term. In Lagrange form, there exists \(\bar{{z}}\in (-|z_{\theta }|,|z_{\theta }|)\) such that
Note that the upper bound of \(R_{4}(z_{\theta })\) is increasing in \(z_{\theta }\) with \(R_{4}(0)=0\). Thus since \(z_{\theta }\rightarrow 0\) as \(n\rightarrow \infty \) by Theorem 1, \(R_{4}(z_{\theta })\rightarrow 0\) as \(n\rightarrow \infty \).\(\square \)
1.2 Preliminary results needed later
Lemma 2
(From Benjamin et al. (2016)) Fix \({\mathbf {x}}_{-\theta }=\sum _{\hat{\theta }\not =\theta }{\mathbf {x}}_{\hat{\theta }}\) and let \({\mathbf {x}}_{\theta },\tilde{{\mathbf {x}}}_{\theta }\in S\). Define \({\Delta \mathbf{x}}=\frac{\varepsilon }{\varTheta }({\mathbf {x}}_{-\theta }+{\mathbf {x}}_{\theta })\) and \({\Delta \tilde{\mathbf {{x}}}}=\frac{\varepsilon }{\varTheta }({\mathbf {x}}_{-\theta }+\tilde{{\mathbf {x}}}_{\theta })\), and define \({\Delta {\mathbf{x}}_{{R}}}\) and \({{\Delta {\tilde{\mathbf{x}}}}_{R}}\) to be the associated restricted NGA outcomes. Then \(({\Delta\mathbf{x}}-{{\Delta{\tilde{\mathbf{x}}}}})\cdot ({\Delta {\mathbf{x}}_{R}}-{{\Delta {\tilde{\mathbf{x}}}}_{R}})\ge 0\) and \(\Vert {\Delta \mathbf{x}}-{{\Delta{\tilde{\mathbf{x}}}}}\Vert \ge \Vert {\Delta {\mathbf{x}}_{R}}-{{\Delta{\tilde{\mathbf{x}}}}_{R}}\Vert \).
Proof
By assumption, the restricted policy space R is convex. Furthermore, by construction, \({{{\Delta }}{\mathbf{x}}}-{{{\Delta }}{} {\mathbf{x}}_{{R}}}\) is normal to R at \({{{\Delta }}{} {\mathbf{x}}_{{R}}}\). Thus, \({{\varvec{\Delta }}{\mathbf{x}}}-{{{\Delta }}{\mathbf{x}}_{{R}}}\) defines a supporting hyperplane with R contained in the lower half-space. Similarly, \({{{{\Delta }}{\tilde{\mathbf{x}}}}}-{{{\Delta }}{\tilde{\mathbf{x}}}_{{R}}}\) defines a supporting hyperplane with R contained in the lower half-space. Since \({{{\Delta }}{\tilde{\mathbf{x}}}_{{R}}}\in R\), it is contained in the lower half-space defined by \({{{\Delta }}{} {\mathbf{x}}}-{{{\Delta }} {\mathbf{x}}_{{R}}}\). Thus, \(({{{\Delta }}\mathbf{x}}-{{{\Delta }}{} \mathbf{x}_{{R}}})\cdot ({{{\Delta }}{\tilde{\mathbf{x}}}_{{R}}}-{{{\Delta }}{} {\mathbf{x}}_{{R}}})\le 0\). Similarly, \(({{{{\Delta }}{\tilde{\mathbf{x}}}}}-{{{\Delta }}{\tilde{\mathbf{x}}}_{{R}}})\cdot ({{{\Delta }} \mathbf{x}_{{R}}}-{{{\Delta }}{\tilde{\mathbf{x}}}_{{R}}})\le 0\).
We can rewrite these equations as
Furthermore,
Summing,
Summing the first two equations above,
Note that \({\mathbf {A}}+{\mathbf {B}}={{{{\Delta }}{\tilde{\mathbf{x}}}}}-{{{\Delta }}{} \mathbf{x}}\). Therefore,
\(\square \)
Lemma 3
Let X be a bounded random variable, and let \({\bar{x}}\) be an upper bound of the support of X.Then for any \(k>0\),
Proof
We can write \({\mathbb {E}}X={\mathbb {E}}(X;X\le k)+{\mathbb {E}}(X;X>k)\) and
Subtracting the two equations,
Since X is bounded above by \({\bar{x}}\),
Thus,
where the final inequality follows from Chebyshev’s inequality for \(k<{\bar{x}}\), and clearly \({\mathbb {P}}(X>k)=0\) if \(k>{\bar{x}}\).\(\square \)
1.3 Proofs for Sect. 6.5 (strategy-proofness)
Theorem 5
Let \({\mathbf {x}}_{\theta }(h)\) denote \(\theta \)’s truthful response given stretching parameter h, let \({\mathbf {x}}_{\theta }^{*}(h,\varTheta )\) denote \(\theta \)’s optimal response given stretching parameter h, when there are \(\varTheta \) agents in the economy, and suppose the probability each agent perceives that the outcome of the mechanism from others actions, \(z_{0}+\Delta z_{-\theta }\) will be at least \(\epsilon /\varTheta \) from the boundary is at least \(1-\xi .\) Then \({\mathbb {E}}U_{\theta }({\mathbf{x}_{-{{\theta }}}},{\mathbf{x}_{{{\theta }}}}(h,\varTheta ))-{\mathbb {E}}U_{\theta }({\mathbf{x}_{-{{\theta }}}},{\mathbf{x}_{{{\theta }}}}(h))\le \xi \frac{\varepsilon }{\varTheta }\Vert {{{\nabla }} \mathbf{U}_{{{\theta }}}}({\mathbf{x}_{-{{\theta }}}},{\mathbf{x}_{{{\theta }}}}(h))\Vert \).
Proof
Note that \({\mathbb {E}}U(x_{-\theta },x_{\theta }^{*})\) is bounded above by the utility \(\theta \) can obtain by reporting ex post. So suppose that agent \(\theta \) is able to report their contribution after observing \({\mathbf{x}_{-{{\theta }}}}\). Conditional on not being able to reach the boundary of the constrained space, Benjamin et al. (2016) show that truth-telling is optimal. So consider the case that \({\mathbf{x}_{-{{\theta }}}}\) is such that \(\theta \) can reach the boundary of the restricted space.
Lemma 2 with \(\tilde {{\mathbf{x}}_{\theta }}={\mathbf {0}}\) shows that \({{{\nabla }}\mathbf{U}_{{{\theta }}}}\cdot ({{{\Delta }}{} \mathbf{x}_{{R}}}-{{{\Delta }}{\tilde{\mathbf{x}}}_{{R}}})\ge 0\) (since \({\mathbf {x}}_{\theta }\) is equal to the normalized gradient). Therefore, \(U_{\theta }({\mathbf{x}_{-{{\theta }}},}{\mathbf {0}})\le U_{\theta }({\mathbf{x}_{-{{\theta }}}},{\mathbf{x}_{{{\theta }}}})\); that is, reporting nothing is dominated by truth-telling.
Note that since utility is locally linear, for any \(\hat{\mathbf {{x}}}_{{{{\theta }}}}\in S\),
The inequality follows from the fact that the directional derivative \({{{\nabla }}_{\mathbf{x}}{} \mathbf{U}_{{{\theta }}}}\) is maximized at \({\mathbf {x}}={{{\nabla }}\mathbf{U}_{{{\theta }}}}\), and since \(\mathbf {{\hat{x}}}_{{{{\theta }}}}\in S\) implies \(\Vert {\mathbf {x}}_{{{{\theta }}}}\Vert \le 1\). In particular, this holds for the optimal report \({\mathbf{x}_{{{\theta }}}^{*}}\).
Thus,
Since truth-telling is the optimal when the agent cannot interact with the boundary, this provides a bound on utility when reports are made ex post. The result follows from the fact that the probability of interacting with the boundary is \(\xi \), and that reporting ex post provides an upper bound on attainable utility.\(\square \)
Lemma 4
Fix \(h,\varTheta ,\theta \) and \(k=\xi (\varTheta )^{-1/2}>0\). Suppose agents (except perhaps \(\theta \)) are truthfully reporting. Define \(\epsilon (h,\varTheta )\) by \(|m(h)|+kd(h)=\frac{ch}{2}-\frac{\epsilon }{\varTheta }\) where \(m(h)={\mathbb {E}}(\Delta z_{-\theta })\) and \(d(h)^{2}={\mathbb {V}}(\Delta z_{-\theta })\). Then
Proof
From the reverse triangle inequality, \(|\Delta z_{-\theta }-m(h)|\ge |\Delta z_{-\theta }|-|m(h)|\). Therefore,
where the last inequality follows from Chebyshev’s inequality.\(\square \)
Theorem 6
Suppose \(\lim _{h\rightarrow \infty }{\mathbb {E}}z_{\theta }(h)>0\).Then the ex ante probability of producing the public good is bounded below by
where \(\beta (\varTheta )=\frac{1}{\varTheta }+\frac{\varTheta -1}{\varTheta }|{\mathbb {E}}z_{\theta }|+\Big (\frac{\varTheta -1}{\xi (\varTheta )\varTheta ^{2}}{\mathbb {V}}(z_{\theta })\Big )^{1/2}\). Furthermore, if h is sufficiently large so that \({\mathbb {E}}z_{\theta }(h)>0\) and \(\xi (\varTheta )\) satisfies \(\xi (\varTheta )\rightarrow 0\) and \(\varTheta \xi (\varTheta )\rightarrow \infty \) as \(\varTheta \rightarrow \infty \), then this lower bound converges to 1 as \(\varTheta \rightarrow \infty \).
Proof
Denote by A the event that the public good is produced. Then,
The ex ante probability of producing the public good is then
Note that \(\Delta z_{R}=\max {\{-ch/2,\min \{\Delta z,ch/2\}\}}\ge \min \{\Delta z,ch/2\}\), implying \({\mathbb {E}}\Delta z_{R}\ge {\mathbb {E}}\min {\{\Delta z,ch/2\}}\). Furthermore, from the definition of \(\Delta z\), there is a natural upper bound \(\Delta z\le \varepsilon \). Thus, Lemma 3 applied to \({\mathbb {E}}\min {\{\Delta z,ch/2\}}\) implies
Combining,
Lemma 1 implies \(\varepsilon =\frac{ch}{2\beta }\) where \(\beta (\varTheta )=\frac{1}{\varTheta }+\frac{\varTheta -1}{\varTheta }|{\mathbb {E}}z_{\theta }|+\left( \frac{\varTheta -1}{\xi \varTheta ^{2}}{\mathbb {V}}(z_{\theta })\right) ^{1/2}\). Furthermore, \({\mathbb {E}}\Delta z=\varepsilon {\mathbb {E}}z_{\theta }\). Thus, taking \(k=\xi (\varTheta )^{-1/2}\),
giving the desired bound. Note that \(\varTheta \xi \rightarrow \infty \) implies \(\frac{\varTheta -1}{\xi \varTheta ^{2}}{\mathbb {V}}(z_{\theta })\rightarrow 0\) as \(\varTheta \rightarrow \infty \), which implies \(\beta (\varTheta )\rightarrow |{\mathbb {E}}z_{\theta }|\). Additionally, \(\xi (\varTheta )\rightarrow 0\) as \(\varTheta \rightarrow \infty \) implies \(\frac{\beta ^{-1}-2(\xi ^{1/2}ch)^{-1}}{\xi ^{-1}}1\{\xi ^{-1/2}<\varepsilon \}\rightarrow 0\). Thus, for h sufficiently large so that \({\mathbb {E}}z_{\theta }(h)>0\),
\(\square \)
Rights and permissions
About this article

Cite this article
Benjamin, D., Heffetz, O., Kimball, M. et al. The relationship between the normalized gradient addition mechanism and quadratic voting. Public Choice 172, 233–263 (2017). https://doi.org/10.1007/s11127-017-0414-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11127-017-0414-3