
Abstract
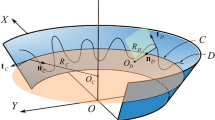
The two vectors of applied and constraint forces form a plane, which is not directly related to the Frenet geometry. Nonetheless, the resultant of the applied and constraint forces lies in a plane defined by the Frenet geometry when the motion trajectory (MT) of the mass center of a rigid body is considered. This, however, is not the case for non-centroidal-point trajectories. For both centroidal and non-centroidal points, an instantaneous motion plane defined by the Frenet-frame osculating plane can be determined. This plane contains the absolute velocity and acceleration vectors, inertia forces including centrifugal force, and resultant of the applied and constraint forces acting at the body center of mass. It is shown that the component of the resultant of the applied and constraint forces along the Frenet bi-normal vector is zero when mass-center trajectories are considered, and therefore, the Frenet bi-normal vector is an instantaneous zero-force axis. The MT analysis is generalized to the case of non-centroidal points in which the bi-normal vector is not orthogonal to the plane formed by the two vectors of applied and constraint forces only. Complexities that arise in case of points different from the mass center are highlighted. At zero-curvature points, singularities that can lead to software crashing can be avoided by proper definition of the vector normal to the space curve. Consequently, the spatial Newton equations can always be transformed to instantaneous planar equations. Developing real-time onboard-computer MT algorithms for autonomous vehicles and positive-train control can contribute to avoiding linearization and simplifications of the equations of motion that may lead to wrong results, particularly in extreme dynamics that characterizes accidents.


















Similar content being viewed by others
Data availability
The data of the models developed in the paper are presented in the numerical example section.
References
Schwarting, W., Alonso-Mora, J., Rus, D.: Planning and decision-making for autonomous vehicles. Annu. Rev. Control Robot. Auton. Syst. 1(1), 187–210 (2018)
Kato, S., Takeuchi, E., Ishiguro, Y., Ninomiya, Y., Takeda, K., Hamada, T.: An open approach to autonomous vehicles. IEEE Micro 35(6), 60–68 (2015)
Martínez-Díaz, M., Soriguera, F.: Autonomous vehicles: theoretical and practical challenges. Transp. Res. Procedia 33, 275–282 (2018)
Werling, M., Ziegler, J., Kammel, S., Thrun, S.: Optimal trajectory generation for dynamic street scenarios in a frenet frame. In: 2010 IEEE International Conference on Robotics and Automation, Anchorage Convention District, May 3–8, 2010, Anchorage, Alaska, USA, 978-1-4244-5040-4/10 (2010)
Lapierre, L., Soetano, D., Pascoal, A.: Nonlinear path following with applications to the control of autonomous under water vehicles. In: Proceedings of the 42nd IEEE Conference on Decision and Control, Paper # TuP08-3, Maui, Hawaii, USA (2003)
Badugu, S., Movva, A.: Positive train control. Int J Emerg Technol Adv Eng 3(4), 304–307 (2013)
Zhang, Z., Liu, X., Holt, K.: Positive train control (PTC) for railway safety in the United States: policy developments and critical issues. Util. Policy 51, 33–40 (2018)
Zhao, Y., Ioannou, P.: Positive train control with dynamic headway based on an active communication system. IEEE Trans. Intell. Transp. Syst. 16(6), 3095–3103 (2015)
Hartong, M., Goel, R., Wijesekera, D.: Positive train control (PTC) failure modes. J. King Saud Univ.-Sci. 23(3), 311–321 (2011)
Price, J., Southworth, J.A.: Positive train control systems. J. Accid. Investig. 2, 304–307 (2006)
Goldstein, H.: Classical Mechanics. Addison-Wesley, Boston (1950)
Greenwood, D.T.: Principles of Dynamics, 2nd edn. Prentice Hall, Englewood Cliffs (1988)
Roberson, R.E., Schwertassek, R.: Dynamics of Multibody Systems. Springer, Berlin (1988)
Shabana, A.A.: Computational Dynamics, 3rd edn. Wiley, New York (2010)
Keshtkar, S., Moreno, J.A., Kojima, H., Uchiyama, K., Nohmi, M., Takaya, K.: Spherical gyroscopic moment stabilizer for attitude control of microsatellites. Acta Astronaut. 143, 9–15 (2018)
Farin, G.: Curves and Surfaces for CAGD, A Practical Guide, 5th edn. Morgan Kaufmann, San Francisco (1999)
Gallier, J.: Geometric Methods and Applications: For Computer Science and Engineering. Springer, New York (2011)
Goetz, A.: Introduction to Differential Geometry. Addison Wesley, Boston (1970)
Kreyszig, E.: Differential Geometry. Dover Publications, Mineola (1991)
Rogers, D.F.: An Introduction to NURBS with Historical Perspective. Academic Press, San Diego (2001)
O’Reilly, O.M.: Engineering Dynamics: A Primer. Springer, New York (2010)
O’Reilly, O.M.: Modeling Nonlinear Problems in the Mechanics of Strings and Rods. Springer, Cham (2017)
Shabana, A.A., Ling, H.: Characterization and quantification of railroad spiral-joint discontinuities. Mech.-Based Des. Struct. Mach. 50(2022), 1–25 (2022)
Shabana, A.A.: Mathematical foundation of railroad vehicle systems: geometry and mechanics. Wiley, Hoboken (2021)
Shabana, A.A.: Frenet oscillations and Frenet–Euler angles: curvature singularity and motion-trajectory analysis. Nonlinear Dyn. 106, 1–19 (2021)
Shabana, A.A.: On the definition of the natural frequency of oscillations in nonlinear large rotation problems. J. Sound Vib. 329, 3171–3181 (2010)
Shabana, A.A., Zaher, M.H., Recuero, A.M., Rathod, C.: Study of nonlinear system stability using eigenvalue analysis: gyroscopic motion. Sound and Vibration 330, 6006–6022 (2011)
Funding
This research was supported by the National Science Foundation (Project # 1852510).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shabana, A.A. Instantaneous motion plane and zero-force axis and their relationship to Frenet geometry. Nonlinear Dyn 111, 15737–15748 (2023). https://doi.org/10.1007/s11071-023-08685-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08685-3