
Abstract
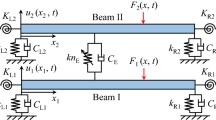
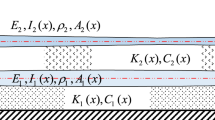
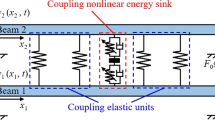
Some complex engineering structures can be modeled as multiple beams connected through coupling elements. When the coupling element is elastic, it can be simplified as a mass-spring system. The existing studies mainly concentrated on the double-beam coupled through elastic connectors, where the connector is simplified as the equivalent linear stiffness element or linear mass-spring system. Furthermore, many researches ignore rotational boundary restraints in analyzing dynamic behavior of the double-beam connected through elastic connectors, limiting their engineering generality. Considering the above limitations, this study attempts to employ the cubic nonlinear stiffness in the coupling mass-spring system and study the potential application of the mass-spring system that is nonlinear on the vibration control of the double-beam system. Using the variational method and the generalized Hamiltonian method build the corresponding system’s governing functions. Applying the Galerkin truncation method (GTM) obtains the dynamic behavior of the double-beam connected through a mass-spring system that is nonlinear. According to this study, the change of the mass-spring system that is nonlinear significantly influences the dynamic behavior of the double-beam system, where the complex dynamic behavior occurs under certain parameters of the mass-spring system that is nonlinear. Suitable parameters of the mass-spring system that is nonlinear are good at the vibration suppression at the boundary of the vibration system. Furthermore, the mass-spring system that is nonlinear can change the characteristics of the double-beam system’s kinetic energy transfer. For the vibration model established in this work, a quasi-periodic vibration state can be regarded as a sign of the occurrence of the targeted energy transfer of the double-beam connected through a mass-spring system that is nonlinear.
















Similar content being viewed by others
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author upon reasonable request.
References
Kang, K.H., Kim, K.J.: Modal properties of beams and plates on resilient supports with rotational and translational complex stiffness[J]. J. Sound Vib. 190(2), 207–220 (1996)
Kim, H.K., Kim, M.S.: Vibration of beams with generally restrained boundary conditions using Fourier series[J]. J. Sound Vib. 245(5), 771–784 (2001)
Li, W.L.: Free vibrations of beams with general boundary conditions[J]. J. Sound Vib. 237(4), 709–725 (2000)
Li, W.L., Zhang, X.F., Du, J.T., Liu, Z.G.: An exact series solution for the transverse vibration of rectangular plates with general elastic boundary supports[J]. J. Sound Vib. 321, 254–269 (2009)
Ye, T.G., Jin, G.Y., Ye, X.M., Wang, X.R.: A series solution for the vibrations of composite laminated deep curved beams with general boundaries[J]. Compos. Struct. 127, 450–465 (2015)
Wang, Q.S., Shi, D.Y., Liang, Q.: Free vibration analysis of axially loaded laminated composite beams with generally boundary conditions by using a modified Fourier-Ritz approach[J]. J. Compos. Mater. 50(15), 2111–2135 (2016)
Chen, Q., Du, J.T.: A Fourier series solution for the transverse vibration of rotating beams with elastic boundary supports[J]. Appl. Acoust. 155, 1–15 (2019)
Wang, Y.H., Du, J.T., Cheng, L.: Power flow and structural intensity analyses of Acoustic Black Hole beams. Mech. Syst. Signal Process. 131, 538–553 (2019)
Xu, D.S., Du, J.T., Zhao, Y.H.: Flexural vibration and power flow analyses of axially loaded beams with general boundary and non-uniform elastic foundations[J]. Adv. Mech. Eng. 12(5), 1–14 (2020)
Xu, D.S., Du, J.T., Tian, C.: Vibration characteristics and power flow analyses of a ship propulsion shafting system with general support and thrust loading. Shock Vib. 2020, 1–13 (2020)
Özhan, B.B., Pakdemirli, M.: A general solution procedure for the forced vibrations of a system with cubic nonlinearities: three-to-one internal resonances with external excitation. J. Sound Vib. 329, 2603–2615 (2010)
Ghayesh, M.H., Kazemirad, S., Darabi, M.A.: A general solution procedure for vibrations of systems with cubic nonlinearities and nonlinear/time-dependent internal boundary conditions. J. Sound Vib. 330, 5382–5400 (2011)
Ghayesh, M.H., Kazemirad, S., Reid, T.: Nonlinear vibrations and stability of parametrically exited systems with cubic nonlinearities and internal boundary conditions: a general solution procedure. Appl. Math. Model. 36(7), 3299–3311 (2012)
Wang, Y.R., Fang, Z.W.: Vibrations in an elastic beam with nonlinear supports at both ends. J. Appl. Mech. Tech. Phys. 56(2), 337–346 (2015)
Mao, X.Y., Ding, H., Chen, L.Q.: Vibration of flexible structures under nonlinear boundary conditions. J. Appl. Mech. 84(11), 111006 (2017)
Tang, B., Brennan, M.J., Manconi, E.: On the use of the phase closure principle to calculate the natural frequencies of a rod or beam with nonlinear boundaries. J. Sound Vib. 433, 461–475 (2018)
Ding, H., Zhu, M.H., Chen, L.Q.: Nonlinear vibration isolation of a viscoelastic beam. Nonlinear Dyn. 92, 325–349 (2018)
Ding, H., Lu, Z.Q., Chen, L.Q.: Nonlinear isolation of transverse vibration of pre-pressure beams. J. Sound Vib. 442, 738–751 (2019)
Ding, H., Chen, L.Q.: Nonlinear vibration of a slightly curved beam with quasi-zero-stiffness isolators. Nonlinear Dyn. 95, 2367–2382 (2019)
Zhao, Y.H., Du, J.T.: Dynamic behavior of an axially loaded beam supported by a mass-spring system that is nonlinear. Int. J. Struct. Stab. Dyn. 2021, 2150152 (2021)
Georgiades, F., Vakakis, A.F.: Dynamics of a linear beam with an attached local nonlinear energy sink. Commun. Nonlinear Sci. Numer. Simul. 12, 643–651 (2007)
Ahmadabadi, Z.N., Khadem, S.E.: Nonlinear vibration control of a cantilever beam by a nonlinear energy sink. Mech. Mach. Theory 50, 134–149 (2012)
Ahmadabadi, Z.N., Khadem, S.E.: Nonlinear vibration control and energy harvesting of a beam using a nonlinear energy sink and a piezoelectric device. J. Sound Vib. 333, 4444–4457 (2014)
Kani, M., Khadem, S.E., Pashaei, M.H., Dardel, M.: Vibration control of a nonlinear beam with a nonlinear energy sink. Nonlinear Dyn. 83, 1–22 (2015)
Parseh, M., Dardel, M., Ghasemi, M.H.: Investigating the robustness of nonlinear energy sink in steady state dynamics of linear beams with different boundary conditions. Commun. Nonlinear Sci. Numer. Simul. 29, 50–71 (2015)
Kani, M., Khadem, S.E., Pashaei, M.H., Dardel, M.: Design and performance analysis of a nonlinear energy sink attached to a beam with different support conditions. J. Mech. Eng. Sci. 230(4), 527–542 (2015)
Parseh, M., Dardel, M., Ghasemi, M.H., Pashaei, M.H.: Steady state dynamics of a non-linear beam coupled to a non-linear energy sink. Int. J. Non-Linear Mech. 79, 48–65 (2016)
Chen, J.E., He, W., Zhang, W., Yao, M.H., Liu, J., Sun, M.: Vibration suppression and higher branch responses of beam with parallel nonlinear energy sinks. Nonlinear Dyn. 91, 885–904 (2018)
Zhang, Y.W., Hou, S., Xu, K.F., Yang, T.Z., Chen, L.Q.: Forced vibration control of an axially moving beam with an attached nonlinear energy sink. Acta Mech. Sol. Sin. 30, 674–682 (2017)
Zhang, Z., Ding, H., Zhang, Y.W., Chen, L.Q.: Vibration suppression of an elastic beam with boundary inerter-enhanced nonlinear energy sinks. Acta Mech. Sol. Sin. 37(3), 387–401 (2021)
Oniszczuk, Z.: Free transverse vibrations of elastically connected simply supported double-beam complex system. J. Sound Vib. 232(2), 387–403 (2000)
Gurgoze, M., Erdogan, G., Inceoglu, S.: Bending vibrations of beams coupled by a double spring-mass system. J. Sound Vib. 243(2), 361–369 (2001)
Pajand, M.R., Hozhabrossadati, S.M.: Free vibration analysis of a double-beam system joined by a mass-spring device. J. Vib. Control 22(13), 3004–3017 (2014)
Hilal, M.A.: Dynamic response of a double Euler-Bernoulli beam due to a moving constant load. J. Sound Vib. 297, 477–491 (2006)
Li, J., Hua, H.X.: Spectral finite element analysis of elastically connected double-beam systems. Finite Elem. Anal. Des. 43, 1155–1168 (2007)
Rosa, M.A.D., Lippiello, M.: Non-classical boundary conditions and DQM for double-beams. Mech. Res. Commun. 34, 538–544 (2007)
Zhang, Y.Q., Lu, Y., Wang, S.L., Liu, X.: Vibration and buckling of a double-beam system under compressive axial loading. J. Sound Vib. 318, 341–352 (2008)
Stojanovic, V., Kozic, P., Paviovic, R., Janevski, G.: Effect of rotary inertia and shear on vibration and buckling of a double beam system under compressive axial loading. Arch. Appl. Mech. 81, 1993–2005 (2011)
Kozic, P., Pavlovic, R., Karlicic, D.: The flexural vibration and buckling of the elastically connected parallel-beams with a Kerr-type layer in between. Mech. Res. Commun. 56, 83–89 (2014)
Palmeri, A., Adhikari, S.: A Galerkin-type state-space approach for transverse vibrations of slender double-beam systems with viscoelastic inner layer. J. Sound Vib. 330, 6372–6386 (2011)
Mao, Q.B.: Free vibration analysis of elastically connected multiple-beams by using the Adomian modified decomposition method. J. Sound Vib. 331, 2532–2542 (2012)
Mao, Q.B.: Vibration and stability of a double-beam system interconnected by an elastic foundation under conservative and nonconservative axial forces. Int. J. Mech. Sci. 93, 1–7 (2015)
Mohammadi, N., Nasirshoaibi, M.: Forced transverse vibration analysis of a Rayleigh double-beam system with a Pasternak middle layer subjected to compressive axial load. J. Vibroeng. 17(8), 4545–4559 (2015)
Pisarski, D., Szmidt, T., Bajer, C., Dyniewicz, B., Bajkowski, J.M.: Vibration control of double-beam system with multiple smart damping members. Shock Vib. 2016, 1–14 (2016)
Fei, H., Danhui, D., Cheng, W., Jia, P.F.: Analysis on the dynamic characteristic of a tensioned double-beam system with a semi theoretical semi numerical method. Compos. Struct. 185(1), 584–599 (2018)
O.O. Agboola, J.A. Gbadeyan, S.A. Iyase. Effects of some structural parameters on the vibration of a simply supported non-prismatic double-beam system. Proceedings of the World Congress on Engineering, 2017, IWCE, Vol I, London, UK
Rahman, M.S., Lee, Y.Y.: New modified multi-level residue harmonic balance method for solving nonlinearly vibrating double-beam problem. J. Sound Vib. 406, 295–327 (2017)
Lee, J., Wang, S.Y.: Vibration analysis of a partially connected double-beam system with the transfer matrix method and identification of the slap phenomenon in the system. Int. J. Appl. Mech. 9(7), 1750093 (2017)
Chen, L.J., Xu, D.S., Du, J.T., Zhong, C.W.: Flexural vibration analysis of nonuniform double-beam system with general boundary and coupling conditions. Shock Vib. 2018, 1–8 (2018)
Hao, Q.J., Zhai, W.J., Chen, Z.B.: Free vibration of connected double-beam system with general boundary conditions by a modified Fourier-Ritz method. Arch. Appl. Mech. 88, 741–754 (2018)
Zhao, X.Z., Asce, P.E.M.: Solution to vibrations of double-Beam systems under general boundary conditions. J. Eng. Mech. 147(10), 04021073 (2021)
Li, Y.X., Xiong, F., Xie, L.Z., Sun, L.Z.: State-space approach for transverse vibration of double-beam systems. Int. J. Mech. Sci. 189, 105974 (2021)
Pajand, M.R., Sani, A.A., Hozhabrossadati, S.M.: Analyzing free vibration of a double-beam joined by a three-degree of freedom system. J. Braz. Soc. Mech. Sci. Eng. 41, 211 (2019)
Guo, T.D., Kang, H.J., Wang, L.H., Zhao, Y.Y.: Nonlinear vibrations for double inclined cables–deck beam coupled system using asymptotic reductions. Int. J. Non-Linear Mech. 108, 33–45 (2019)
Stojanovic, V., Petkovic, M.D., Milic, D.: Nonlinear vibrations of a coupled beam-arch bridge system. J. Sound Vib. 464(4), 115000 (2020)
Funding
This work is supported by the National Natural Science Foundation of China (Grant No. 11972125 and 12102101).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest in preparing this article.
Human or animal rights
No human or animal subjects were used in this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Appendix B
Appendix C
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhao, Y., Du, J., Chen, Y. et al. Nonlinear dynamic behavior analysis of an elastically restrained double-beam connected through a mass-spring system that is nonlinear. Nonlinear Dyn 111, 8947–8971 (2023). https://doi.org/10.1007/s11071-023-08351-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08351-8