
Abstract
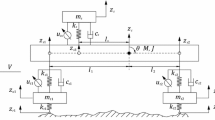
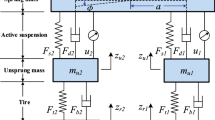
In this research, a multi-objective frequency domain-constrained static output feedback control is developed for the delayed active suspension system with wheelbase preview information. Firstly, the model of the half-vehicle active suspension system with wheelbase preview information and time delay is constructed by employing the augmented method. Secondly, in vertical vibration, the human body senses are more intense when the frequency of the external disturbance is in the range of 4–8 Hz. Therefore, a finite frequency control method is proposed for the controller design with robust \( H_{\infty } \) and generalized \( H_{2} \) performance. Thirdly, considering that a full online knowledge of states is not available in practical suspension systems, a static output feedback strategy is proposed to guarantee the feasibility of the controller by using a two-stage method. Finally, simulation study is given to explain the effectiveness and superiority of the presented controller.








Similar content being viewed by others

References
Apkarian, P., Tuan, H., Bernussou, J.: Continuous-time analysis, eigenstructure assignment, and \( H_{2} \) synthesis with enhanced linear matrix inequalities (lmi) characterizations. IEEE Trans. Autom. Control 46(12), 1941–1946 (2001)
Bender, E.: Optimum linear preview control with application to vehicle suspension. J. Basic Eng. 90(2), 213–221 (1968)
Cao, F., Sun, H., Li, Y., Tong, S.: Fuzzy adaptive fault-tolerant control for a class of active suspension systems with time delay. Int. J. Fuzzy Syst. 21(7), 2054–2065 (2019)
Chen, H., Guo, K.H.: Constrained \(H_{\infty }\) control of active suspensions: an LMI approach. IEEE Trans. Control Syst. Technol. 13(3), 412–421 (2005)
Chen, S., Cai, Y., Wang, J., Yao, M.: A novel lqg controller of active suspension system for cehicle roll safety. Int. J. Control Autom. Syst. 16(5), 2203–2213 (2018)
Crusius, C.A.R., Trofino, A.: Sufficient lmi conditions for output feedback control problems. IEEE Trans. Autom. Control 44(5), 1053–1057 (1999)
Ding, S., Chen, W., Mei, K., Murray-Smith, D.J.: Disturbance observer design for nonlinear systems represented by input–output models. IEEE Trans. Ind. Electron. 67(2), 1222–1232 (2020)
Dinh, H.T., Nguyen, T.G.: Saturated feedback control to improve ride comfort for uncertain nonlinear Macpherson active suspension system with input delay. IEEE Access 8, 129136–129145 (2020)
Dong, J., Yang, G.: Robust static output feedback control synthesis for linear continuous systems with polytopic uncertainties. Automatica 49(6), 1821–1829 (2013)
Guan, Y., Han, Q., Yao, H., Ge, X.: Robust event-triggered \(H_{\infty }\) controller design for vehicle active suspension systems. Nonlinear Dyn. 94(1), 627–638 (2018)
Hao, Y., Duan, Z.: Static output-feedback controller synthesis with restricted frequency domain specifications for time-delay systems. IET Control Theory Appl. 9(10), 1608–1614 (2015)
Karim Afshar, K., Javadi, A., Jahed-Motlagh, M.R.: Robust \(H_{\infty }\) control of an active suspension system with actuator time delay by predictor feedback. IET Control Theory Appl. 12(7), 1012–1023 (2018)
Kazemy, A., Lam, J., Li, X.: Finite-frequency \(H_{\infty }\) control for offshore platforms subject to parametric model uncertainty and practical hard constraints. ISA Trans. 83, 53–65 (2018)
Li, H., Jing, X., Karimi, H.R.: Output-feedback-based \(H_{\infty }\) control for vehicle suspension systems with control delay. IEEE Trans. Industr. Electron. 61(1), 436–446 (2014)
Li, H., Liu, H., Hand, S., Hilton, C.: Design of robust \(H_{\infty }\) controller for a half-vehicle active suspension system with input delay. Int. J. Syst. Sci. 44(4–6), 625–640 (2013)
Li, H., Zhang, Z., Yan, H., Xie, X.: Adaptive event-triggered fuzzy control for uncertain active suspension systems. IEEE Trans. Cybern. 49(12), 4388–4397 (2019)
Li, P., Lam, J., Cheung, K.C.: Multi-objective control for active vehicle suspension with wheelbase preview. J. Sound Vib. 333(21), 5269–5282 (2014)
Li, P., Lam, J., Cheung, K.C.: Velocity-dependent multi-objective control of vehicle suspension with preview measurements. Mechatronics 24(5), 464–475 (2014)
Li, P., Li, P., Liu, Y., Bao, H., Lu, R.: \(H_{\infty }\) control of periodic piecewise polynomial time-varying systems with polynomial Lyapunov function. J. Franklin Inst. 356(13), 6968–6988 (2019)
Li, W., Xie, Z., Wong, P.K., Cao, Y., Zhao, J.: Robust nonfragile \(H_{\infty }\) optimum control for active suspension systems with time-varying actuator delay. J. Vib. Control 25(18), 2435–2452 (2019)
Li, W., Xie, Z., Wong, P.K., Ma, X., Cao, Y., Zhao, J.: Nonfragile \(H_{\infty }\) control of delayed active suspension systems in finite frequency under nonstationary running. J. Dyn. Syst. Measur. Control-Trans. ASME 141(6), 61001 (2019)
Li, W., Xie, Z., Zhao, J., Wong, P.K., Li, P.: Fuzzy finite-frequency output feedback control for nonlinear active suspension systems with time delay and output constraints. Mech. Syst. Signal Process. 132, 315–334 (2019)
Li, X., Gao, H.: A heuristic approach to static output-feedback controller synthesis with restricted frequency-domain specifications. IEEE Trans. Autom. Control 59(4), 1008–1014 (2014)
Liang, Z., Zhao, J., Dong, Z., Wang, Y., Ding, Z.: Torque vectoring and rear-wheel-steering control for vehicle’s uncertain slips on soft and slope terrain using sliding mode algorithm. IEEE Trans. Veh. Technol. 69(4), 3805–3815 (2020)
Liberzon, A., Rubinstein, D., Gutman, P.O.: Active suspension for single wheel station of off-road track vehicle. Int. J. Robust Nonlinear Control 11(10), 977–999 (2001)
Liu, L., Ding, S., Yu, X.: Second-order sliding mode control design subject to an asymmetric output constraint. IEEE Trans. Circuits Syst. II: Express Briefs 1 (2020)
Liu, L., Zheng, W.X., Ding, S.: An adaptive sosm controller design by using a sliding-mode-based filter and its application to buck converter. IEEE Trans. Circuits Syst. I Regul. Pap. 67(7), 2409–2418 (2020)
Liu, Y.J., Zeng, Q., Tong, S., Chen, C.L.P., Liu, L.: Actuator failure compensation-based adaptive control of active suspension systems with prescribed performance. IEEE Trans. Ind. Electron. 67(8), 7044–7053 (2020)
Ma, X., Wong, P.K., Zhao, J.: Practical multi-objective control for automotive semi-active suspension system with nonlinear hydraulic adjustable damper. Mech. Syst. Signal Process. 117, 667–688 (2019)
Min, X., Li, Y., Tong, S.: Adaptive fuzzy optimal control for a class of active suspension systems with full-state constraints. IET Intel. Transp. Syst. 14(5), 371–381 (2020)
Pan, H., Sun, W., Jing, X., Gao, H., Yao, J.: Adaptive tracking control for active suspension systems with non-ideal actuators. J. Sound Vib. 399, 2–20 (2017)
Pang, H., Shang, Y., Yang, J.: An adaptive sliding mode-based fault-tolerant control design for half-vehicle active suspensions using t-s fuzzy approach. J. Vib. Control 26(17–18), 1411–1424 (2020)
Qin, Y., Rath, J.J., Hu, C., Sentouh, C., Wang, R.: Adaptive nonlinear active suspension control based on a robust road classifier with a modified super-twisting algorithm. Nonlinear Dyn. 97(4), 2425–2442 (2019)
Qin, Y., Tang, X., Jia, T., Duan, Z., Zhang, J., Li, Y., Zheng, L., Kazmerski, L.: Noise and vibration suppression in hybrid electric vehicles: state of the art and challenges. Renew. Sustain. Energy Rev. 124, 109782 (2020)
Qin, Y., Wang, Z., Xiang, C., Hashemi, E., Khajepour, A., Huang, Y.: Speed independent road classification strategy based on vehicle response: theory and experimental validation. Mech. Syst. Signal Process. 117, 653–666 (2019)
Rao, L.V.V.G., Narayanan, S.: Optimal response of half car vehicle model with sky-hook damper using LQR with look ahead preview control. J. Brazil. Soc. Mech. Sci. Eng. 42(9), 1–9 (2020)
Ryu, S., Park, Y., Suh, M.: Ride quality analysis of a tracked vehicle suspension with a preview control. J. Terrramech. 48(6), 409–417 (2011)
Shao, X., Naghdy, F., Du, H., Li, H.: Output feedback \(H_{\infty }\) control for active suspension of in-wheel motor driven electric vehicle with control faults and input delay. ISA Trans. 92, 94–108 (2019)
Sun, W., Gao, H., Kaynak, O.: Finite frequency \(H_{\infty }\) control for vehicle active suspension systems. IEEE Trans. Control Syst. Technol. 19(2), 416–422 (2011)
Wang, G., Chen, C., Yu, S.: Optimization and static output-feedback control for half-car active suspensions with constrained information. J. Sound Vib. 378, 1–13 (2016)
Wang, R., Jing, H., Yan, F., Karimi, H.R., Chen, N.: Optimization and finite-frequency \(H_{\infty }\) control of active suspensions in in-wheel motor driven electric ground vehicles. J. Frankl. Inst. 352(2), 468–484 (2015)
Xu, S., Lam, J., Yang, C.: Robust \(H_{\infty }\) control for uncertain singular systems with state delay. Int. J. Robust Nonlinear Control 13, 1213–1223 (2003)
Yin, X., Zhang, L., Zhu, Y., Wang, C., Li, Z.: Robust control of networked systems with variable communication capabilities and application to a semi-active suspension system. IEEE/ASME Trans. Mechatron. 21(4), 2097–2107 (2016)
Zhang, H., Hong, Q., Yan, H., Yang, F., Guo, G.: Event-based distributed \(H_{\infty }\) filtering networks of 2dof quarter-car suspension systems. IEEE Trans. Ind. Inf. 13(1), 312–321 (2017)
Zhang, H., Wang, R., Wang, J., Shi, Y.: Robust finite frequency \(H_{\infty }\) static-output-feedback control with application to vibration active control of structural systems. Mechatronics 24(4), 354–366 (2014)
Zhang, J., Ding, F., Zhang, N., Chen, S., Zhang, B.: A new ssukf observer for sliding mode force tracking \(H_{\infty }\) control of electrohydraulic active suspension. Asian J. Control 22(2), 761–778 (2020)
Zhang, X., Yang, G.: Performance analysis for multi-delay systems in finite frequency domains. Int. J. Robust Nonlinear Control 22(8), 933–944 (2012)
Zhao, J., Wong, P.K., Ma, X., Xie, Z.: Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy. Veh. Syst. Dyn. 55(1), 72–103 (2016)
Zhu, Q., Ding, J., Yang, M.: LQG control based lateral active secondary and primary suspensions of high-speed train for ride quality and hunting stability. IET Control Theory Appl. 16(10), 1497–1504 (2018)
Acknowledgements
This work is supported by National Natural Science Foundation of China (Grant No. 51705084), the Fundamental Research Funds for the Central Universities (Grant No. N2003032), the Natural Science Foundation of Guangdong Province of China (Grant Nos. 2019A1515011602 and 2018MS46), the Opening Project of Guangdong Provincial Key Laboratory of Technique and Equipment for Macromolecular Advanced Manufacturing, South China University of Technology, China (Grant No. 2020kfkt05). This work is also supported by the research Grant of the University of Macau (Grant No. MYRG2019-00028-FST).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhao, J., Wang, X., Wong, P.K. et al. Multi-objective frequency domain-constrained static output feedback control for delayed active suspension systems with wheelbase preview information. Nonlinear Dyn 103, 1757–1774 (2021). https://doi.org/10.1007/s11071-021-06204-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06204-w