
Abstract
The inerter is a two-terminal mechanical element that produces forces directly proportional to the relative acceleration between these terminals. The linear behaviour of this element has already been described in the literature. In this work, the nonlinear effects of the geometrical arrangement of the inerter are investigated in terms of vibration isolation and compared to the traditional arrangement. The analysis comprises the use of harmonic-balanced method applied to the exact equation, as well as approximations for low amplitude and high amplitude. Numerical analysis is used to complement the investigation. Comparison with classic vibration isolators shows possible benefits for high frequency regimes. The effects from the geometrical nonlinearity vanish when the amplitude of motion is large.






















Similar content being viewed by others

References
Al-Shudeifat, M.A.: Amplitudes decay in different kinds of nonlinear oscillators. J. Vib. Acoust. 137(3), 031,012 (2015)
Avramov, K., Gendelman, O.: Interaction of elastic system with snap-through vibration absorber. Int. J. Non Linear Mech. 44(1), 81–89 (2009)
Bird, W.: Antivibration suspension device, p. 1,506,557. US Patent (1924)
Carrella, A., Brennan, M., Waters, T.: Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 301(3), 678–689 (2007)
Evangelou, S., Limebeer, D.J., Sharp, R.S., Smith, M.C.: Steering compensation for high-performance motorcycles. In: 43rd IEEE Conference on Decision and Control, 2004. CDC, vol. 1, pp. 749–754. IEEE (2004)
Flannelly, W.G.: Dynamic anti-resonant vibration isolator, p. 3,445,080. US Patent (1969)
Frahm, H.: Device for damping vibrations of bodies, p. 989,958. US Patent (1911)
Galassi, M., Davies, J., Theiler, J., Gough, B., Jungman, G., Alken, P., Booth, M., Rossi, F., Ulerich, R.: Gnu scientific library reference manual. ISBN: 0954612078. Library available online at http://www.gnu.org/software/gsl (2015)
Gonzalez-Buelga, A., Lazar, I.F., Jiang, J.Z., Neild, S.A., Inman, D.J.: Assessing the effect of nonlinearities on the performance of a tuned inerter damper. Struct. Control Health Monit. 24(3), e1879–n/a (2017). E1879 STC-15-0213.R1
Goodwin, A.: Vibration isolators, p. 3,322,379 A. US Patent (1967)
Hamdan, M., Dado, M.: Large amplitude free vibrations of a uniform cantilever beam carrying an intermediate lumped mass and rotary inertia. J. Sound Vib. 206(2), 151–168 (1997)
Hao, Z., Cao, Q., Wiercigroch, M.: Nonlinear dynamics of the quasi-zero-stiffness sd oscillator based upon the local and global bifurcation analyses. Nonlinear Dyn. 87(2), 987–1014 (2017)
Ibrahim, R.: Recent advances in nonlinear passive vibration isolators. J. Sound Vib. 314(3), 371–452 (2008)
Jones, E., Oliphant, T., Peterson, P., et al.: SciPy: open source scientific tools for Python (2001). http://www.scipy.org/
Liu, C., Jing, X.: Vibration energy harvesting with a nonlinear structure. Nonlinear Dyn. 84(4), 2079–2098 (2016)
Liu, Y., Chen, M.Z., Tian, Y.: Nonlinearities in landing gear model incorporating inerter. In: 2015 IEEE International Conference on Information and Automation, pp. 696–701. IEEE (2015)
Marinca, V., Herisanu, N.: Nonlinear Dynamical Systems in Engineering: Some Approximate Approaches. Springer, Berlin (2012)
McKerns, M.M., Strand, L., Sullivan, T., Fang, A., Aivazis, M.A.: Building a framework for predictive science. arXiv preprint arXiv:1202.1056 (2012)
Nordin, M., Galic’, J., Gutman, P.O.: New models for backlash and gear play. Int. J. Adapt. Control Signal Process. 11(1), 49–63 (1997)
Papageorgiou, C., Houghton, N.E., Smith, M.C.: Experimental testing and analysis of inerter devices. J. Dyn. Syst. Meas. Control 131(1), 011,001 (2009)
Papageorgiou, C., Smith, M.C.: Laboratory experimental testing of inerters. In: 44th IEEE Conference on Decision and Control, 2005 and 2005 European Control Conference. CDC-ECC’05, pp. 3351–3356. IEEE (2005)
Roberson, R.: Synthesis of a nonlinear dynamic vibration absorber. J. Frankl. Inst. 254, 205–220 (1952)
Sapsis, T.P., Quinn, D.D., Vakakis, A.F., Bergman, L.A.: Effective stiffening and damping enhancement of structures with strongly nonlinear local attachments. J. Vib. Acoust. 134(1), 011,016 (2012)
Shaw, A., Neild, S., Wagg, D., Weaver, P., Carrella, A.: A nonlinear spring mechanism incorporating a bistable composite plate for vibration isolation. J. Sound Vib. 332(24), 6265–6275 (2013)
Smith, M.C.: Synthesis of mechanical networks: the inerter. IEEE Trans. Autom. Control 47(10), 1648–1662 (2002)
Smith, M.C., Walker, G.W.: A mechanical network approach to performance capabilities of passive suspensions. In: Proceedings of the Workshop Modelling and Control of Mechanical Systems, pp. 103–117. Imperial College Press (1997)
Smith, M.C., Wang, F.C.: Controller parameterization for disturbance response decoupling: application to vehicle active suspension control. IEEE Trans. Control Syst. Technol. 10(3), 393–407 (2002)
Starosvetsky, Y., Gendelman, O.: Vibration absorption in systems with a nonlinear energy sink: nonlinear damping. J. Sound Vib. 324, 916–939 (2009)
Sun, J., Huang, X., Liu, X., Xiao, F., Hua, H.: Study on the force transmissibility of vibration isolators with geometric nonlinear damping. Nonlinear Dyn. 74(4), 1103–1112 (2013)
Tang, B., Brennan, M.: A comparison of two nonlinear damping mechanisms in a vibration isolator. J. Sound Vib. 332(3), 510–520 (2013)
Ushijima, T., Takano, K., Kojima, H.: High performance hydraulic mount for improving vehicle noise and vibration. Technical report, SAE Technical Paper (1988)
Vakakis, A.: Inducing passive nonlinear energy sinks in linear vibrating systems. J. Vib. Acoust. 123(3), 324–332 (2001)
Wang, F.C., Liao, M.K., Liao, B.H., Su, W.J., Chan, H.A.: The performance improvements of train suspension systems with mechanical networks employing inerters. Veh. Syst. Dyn. 47(7), 805–830 (2009)
Wang, F.C., Su, W.J.: Inerter nonlinearities and the impact on suspension control. In: 2008 American Control Conference, pp. 3245–3250 (2008)
Xin, D., Yuance, L., Michael, Z.C.: Application of inerter to aircraft landing gear suspension. In: Control Conference (CCC), 2015 34th Chinese, pp. 2066–2071. IEEE (2015)
Yilmaz, C., Kikuchi, N.: Analysis and design of passive band-stop filter-type vibration isolators for low-frequency applications. J. Sound Vib. 291(3), 1004–1028 (2006)
Yu, Y., Naganathan, N.G., Dukkipati, R.V.: A literature review of automotive vehicle engine mounting systems. Mech. Mach. Theory 36(1), 123–142 (2001)
Zhang, Z., Chen, M.Z., Huang, L.: Frequency response of a suspension system with inerter and play. In: BEIJING. The 21th international congress of sound and vibration (2014)
Author information
Authors and Affiliations
Corresponding author
Appendices
Polynomial terms
The polynomial terms defining Eqs. 24 and 25:
Polynomial terms: stability
The polynomial terms defining the stability Eqs. 33 and 34:

Comparison of the absolute transmissibility considering the exact equation, the mass–spring–damper, the mass–spring–damper–inerter isolators and a system with an auxiliary TMD. \(X_0=0.3\), \(\mu =0.3\), \(\xi =0.01\)
Absolute transmissibility of linear systems
The absolute transmissibility of a linear spring–mass–damper system is given by
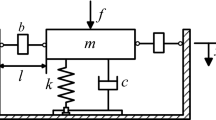
The absolute transmissibility of a linear spring–mass–damper–inerter system of Fig. 2 is given by
Comparison with tuned mass damper (TMD)
To complement the analysis described in this paper, a comparison of the proposed system with the tuned mass damper is shown in Fig. 23. In this analysis, the natural frequency of the auxiliary system was tuned in the same resonance frequency of the primary system.
Rights and permissions
About this article

{kind=link}
Cite this article
Moraes, F.d.H., Silveira, M. & Gonçalves, P.J.P. On the dynamics of a vibration isolator with geometrically nonlinear inerter. Nonlinear Dyn 93, 1325–1340 (2018). https://doi.org/10.1007/s11071-018-4262-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4262-6