
Abstract
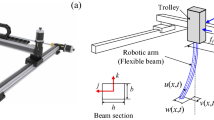
The problem of control of three-dimensional incompressible hyperelastic cantilever beams is approached from an analytical dynamics perspective. The dynamic equations of motion of the hyperelastic beam are derived using the absolute nodal coordinate formulation, which is a finite element method that accurately describes large-deformation and large-rotation nonlinear motion in structures. The fully parameterized classical ANCF element is used to characterize the displacement field of each finite element in the beam. Nonlinear constitutive models (such as the near-incompressible neo-Hookean material model) are used to describe the rubber-like behavior of the beam. Control of such a hyperelastic beam is approached using the theory of constrained motion, where the control objectives are reformulated as constraints that are imposed on the continuum. The fundamental equation of mechanics is employed to obtain the explicit generalized nonlinear control forces in closed form, which are applied at the nodes of the beam in order to achieve the desired control objectives. No linearizations and/or approximations are made in the dynamics of the nonlinear continuum, and no a priori structure is imposed on the nature of the nonlinear controller. Four numerical simulations demonstrating the control of a highly flexible 30-element hyperelastic cantilever beam are presented to show the efficacy of the control methodology in achieving the desired control objectives.














Similar content being viewed by others

References
Ako, H.: Flutter control system for aircraft wings (1992). US Patent 5,135,186
Bonet, J., Wood, R.D.: Nonlinear continuum mechanics for finite element analysis. Cambridge University Press, Cambridge (1997)
Cho, H., Udwadia, F.E.: Explicit control force and torque determination for satellite formation-keeping with attitude requirements. J. Guid. Control Dyn. 36(2), 589–605 (2013)
Çimen, T.: State-dependent Riccati equation (SDRE) control: a survey. In: Proceedings of the 17th World Congress, IFAC, Seoul, Korea, July 6–11 (2008)
Hall II, E.K., Mueller, J.T.: Coupled vibration isolation/suppression system for space applications: aspects of structural design. In: Smart Structures and Materials’ 95, pp. 136–144. International Society for Optics and Photonics (1995)
Holzapfel, G.A.: Nonlinear Solid Mechanics, vol. 24. Wiley, Chichester (2000)
Krstic, M., Kanellakopoulos, I., Kokotovic, P.V.: Nonlinear and Adaptive Control Design. Wiley, New York (1995)
Maqueda, L.G., Shabana, A.A.: Poisson modes and general nonlinear constitutive models in the large displacement analysis of beams. Multibody Syst. Dyn. 18(3), 375–396 (2007)
Marchese, A.D., Komorowski, K., Onal, C.D., Rus, D.: Design and control of a soft and continuously deformable 2d robotic manipulation system. In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2189–2196. IEEE (2014)
Mylapilli, H.: Constrained motion approach to the synchronization of the multiple coupled slave gyroscopes. J. Aerosp. Eng. 26(4), 814–828 (2013). doi:10.1061/(ASCE)AS.1943-5525.0000192
Mylapilli, H.: An analytical dynamics approach to the control of mechanical systems. Ph.D. Thesis, University of Southern California (2015)
Orzechowski, G., Fraczek, J.: Nearly incompressible nonlinear material models in the large deformation analysis of beams using ANCF. Nonlinear Dyn. 82(1–2), 451–464 (2015)
Pappalardo, C.M.: A natural absolute coordinate formulation for the kinematic and dynamic analysis of rigid multibody systems. Nonlinear Dyn. 81(4), 1841–1869 (2015)
Peters, J., Mistry, M., Udwadia, F., Nakanishi, J., Schaal, S.: A unifying framework for robot control with redundant DOFs. Auton. Robots 24(1), 1–12 (2008)
Rus, D., Tolley, M.T.: Design, fabrication and control of soft robots. Nature 521(7553), 467–475 (2015)
Schutte, A.D., Udwadia, F.E., Lam, T.: Nonlinear dynamics and control of a dumbbell spacecraft system. In: Earth & Space 2008@ sEngineering, Science, Construction, and Operations in Challenging Environments, pp. 1–14. ASCE (2008)
Shabana, A.A.: Computational Continuum Mechanics. Cambridge University Press, New York (2011)
Shabana, A.A., Yakoub, R.Y.: Three dimensional absolute nodal coordinate formulation for beam elements: theory. J. Mech. Des. 123(4), 606–613 (2001)
Song, O., Librescu, L., Rogers, C.: Application of adaptive technology to static aeroelastic control of wing structures. AIAA J. 30(12), 2882–2889 (1992)
Sontag, E.: Mathematical Theory of Control: Deterministic Finite Dimensional Systems. Springer, Berlin (1998)
Udwadia, F.E.: A new perspective on the tracking control of nonlinear structural and mechanical systems. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 459(2035), 1783–1800 (2003)
Udwadia, F.E.: Optimal tracking control of nonlinear dynamical systems. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 464(2097), 2341–2363 (2008)
Udwadia, F.E., Kalaba, R.E.: A new perspective on constrained motion. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 439, 407–410 (1992)
Udwadia, F.E., Kalaba, R.E.: On motion. J. Frankl. Inst. 330(3), 571–577 (1993)
Udwadia, F.E., Kalaba, R.E.: Analytical Dynamics: A New Approach. Cambridge University Press, Cambridge (1996). doi:10.1017/cbo9780511665479
Udwadia, F.E., Koganti, P.B.: Optimal stable control for nonlinear dynamical systems: an analytical dynamics based approach. Nonlinear Dyn. 82(1–2), 547–562 (2015)
Udwadia, F.E., Koganti, P.B., Wanichanon, T., Stipanović, D.M.: Decentralised control of nonlinear dynamical systems. Int. J. Control 87(4), 827–843 (2014)
Udwadia, F.E., Mylapilli, H.: Energy control of inhomogeneous nonlinear lattices. Proc. R. Soc. A 471(2176), 20140694 (2015)
Udwadia, F.E., Mylapilli, H.: Energy control of nonhomogeneous Toda lattices. Nonlinear Dyn. 81(3), 1355–1380 (2015)
Udwadia, F.E., Mylapilli, H.: Constrained motion of mechanical systems and tracking control of nonlinear systems: connections and closed-form results. Nonlinear Dyn. Syst. Theory 15(1), 73–89 (2015)
Udwadia, F.E., Schutte, A.D.: An alternative derivation of the quaternion equations of motion for rigid-body rotational dynamics. J. Appl. Mech. 77(4), 044505 (2010)
Udwadia, F.E., Schutte, A.D.: A unified approach to rigid body rotational dynamics and control. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 468, 395–414 (2012)
Udwadia, F.E., Wanichanon, T.: Control of uncertain nonlinear multibody mechanical systems. J. Appl. Mech. 81(4), 041020 (2014)
Winter, D.A.: Biomechanics and Motor Control of Human Movement. Wiley, New York (2009)
Yakoub, R.Y., Shabana, A.A.: Three dimensional absolute nodal coordinate formulation for beam elements: implementation and applications. J. Mech. Des. 123(4), 614–621 (2001)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mylapilli, H., Udwadia, F.E. Control of three-dimensional incompressible hyperelastic beams. Nonlinear Dyn 90, 115–135 (2017). https://doi.org/10.1007/s11071-017-3651-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3651-6