
Abstract
We call attention to a dual-pair concept for modeling hysteresis involving instantaneous switching: Specifically, there are two input–output pairs for each hysteresis model under one specific input, namely a differential pair and an integral pair. Currently in engineering mechanics, only one pair is being recognized and utilized, not the other. Whereas this dual-pair concept is inherent in the differential and algebraic forms of memristors and memcapacitors, the concept has not been carried over to memristive system theory, nor to memcapacitive system theory. We show that the “zero-crossing” feature in memristors, memcapacitors, and memristive/memcapacitive models (i.e., the “mem-models”) is also a feature of the differential pairs of well-known non-mem-models, examples of which are Ramberg–Osgood, Bouc–Wen, bilinear hysteresis, and classical Preisach. The dual-pair concept thus connects mem-models and non-mem-models, thereby facilitating the modeling of hysteresis, and raising a set of scientific questions for further studies that might not otherwise come to awareness.










Similar content being viewed by others
Abbreviations
- \(\dot{x}\) :
-
Velocity
- x :
-
Displacement
- a :
-
Absement, the first time integral of displacement, x
- \(\dot{r}\) :
-
The first time derivative of r
- r :
-
Resisting force or characteristic force of an element
- p :
-
General momentum, the first time integral of r
- \(\rho \) :
-
The first time integral of p
- t :
-
Time
- \(\mathbf {y}\) :
- w :
-
Internal state variable
- u :
-
Driving force
- G :
- F :
- \(\mathbf {g}\) :
- \(\mathbf {f}\) :
References
Bernardo, M.D., Budd, C.J., Champneys, A.R., Kowalczyk, P.: Piecewise-smooth Dynamical Systems Theory and Applications, Applied Mathematical Sciences vol. 163. Springer (2008)
Bouc, R.: Modèle mathématique d’hystérésis. Acustica 21, 16–25 (1971)
Canfield, R.: central_diff.m. http://www.mathworks.com/matlabcentral/fileexchange/12-central-diff-m/content/central_diff.m (2015)
Caughey, T.K.: Random excitation of a system with bilinear hysteresis. J. Appl. Mech. 27, 649–652 (1960a)
Caughey, T.K.: Sinusoidal excitation of a system with bilinear hysteresis. J. Appl. Mech. 27, 640–643 (1960b)
Chua, L.O.: Memrister-the missing circuit element. IEEE Trans. Circuit Theory CT 18(5), 507–519 (1971)
Chua, L.O.: Resistance switching memories are memristors. Appl. Phys. A Mater. Sci. Process. 102, 765–783 (2011)
Chua, L.O., Kang, S.M.: Memristive devices and systems. In: Proceedings of the IEEE, vol. 64, pp. 209–223 (1976)
Di Ventra, M., Pershin, Y.V., Chua, L.O.: Circuit elements with memory: Memristors, memcapacitors, and meminductors. In: Proceedings of IEEE, vol. 97, pp. 1717–1724 (2009)
Diani, J., Fayolle, B., Gilormini, P.: A review on the mullins effect. Eur. Polymer J. 45, 601–612 (2009)
Ismail, M., Ikhouane, F., Rodellar, J.: The hysteresis bouc-wen model, a survey. Arch. Comput. Methods Eng. 16, 161–188 (2009)
Janičić, V., Ilić, V.: Preisach model gui version 1.0. http://www.mathworks.com/matlabcentral/fileexchange/47763-hysteresis-in-ferromagnetic-gui (2014)
Jeltsema, D., Scherpen, J.M.A.: Multidomain modeling of nonlinear networks and systems: energy- and power-based perspectives. IEEE Control Syst. Mag. 29(4), 28–59 (2009)
Jennings, P.C.: Periodic response of a general yielding structure. J. Eng. Mech. Division Proc. Am.Soc. Civ. Eng. 90(EM2), 131–166 (1964)
Kádár, G., Szabó, Z., Vértesy, G.: Product preisach model parameters from measured magnetization curves. Physica B 343, 137–141 (2004)
Karnopp, D.C., Margolis, D.L., Rosenberg, R.C.: System Dynamics: Modeling, Simulation, and Control of Mechatronics Systems, 5th edn. Wileys, Hoboken (2012)
Krasnosel’skiǐ, M.A., Pokrovskiǐ, A.V.: Systems with Hysteresis. Springer, Berlin (1983)
LeVeque, R.J.: Wave propagation software, computational science, and reproducible research. In: Proceedings of the International Congress of Mathematicians, pp. 1227–1253. European Mathematical Society, Madrid (2006)
Mayergoyz, I.: Mathematical Models of Hysteresis and Their Applications. Elsevier Series in Electromagnetism. Elsevier Science Ltd, Oxford (2003)
Oster, G.F., Auslander, D.M.: The memristor: a new bond graph element. ASME J. Dyn. Syst. Meas. Control 94(3), 249–252 (1973)
Paynter, H.M.: Analysis and Design of Engineering Systems: Class Notes for M.I.T. Course 2.751. M.I.T. Press, Cambridge (1961)
Paytner, H.M.: The gestation and birth of bond graphs. http://www.me.utexas.edu/~longoria/paynter/hmp/Bondgraphs.html (2000)
Pei, J.S., Wright, J.P., Gay-Balmaz, F., Todd, M.D.: Choices in state variables for using state-event location to model piecewise restoring force, to be submitted for review for publication in Nonlinear Dynamics (2017)
Pei, J.S., Wright, J.P., Todd, M.D., Masri, S.F., Gay-Balmaz, F.: Understanding memristors and memcapacitors for engineering mechanical applications. Nonlinear Dyn. 80(1), 457–489 (2015)
Scruggs, J.T., Gavin, H.P.: The Control Handbook. 2nd edn. (three volume set), 3526 pp. CRC Press, Boca Raton (2010)
Shampine, L.F., Gladwell, I., Brankin, R.W.: Reliable solution of special event location problems for odes. ACM Trans. Math. Softw. 17(1), 11–25 (1991)
Sivaselvan, M.V., Reinhorn, A.M.: Hysteretic models for deteriorating inelastic structures. ASCE J. Eng. Mech. 126(6), 633–640 (2000)
Szabó, Z.: Preisach functions leading to closed form permeability. Physica B 372, 61–67 (2006)
Szabó, Z., Tugyi, I., Kádár, G., Füzi, J.: Identification procedures for scalar preisach model. Physica B 343, 142–147 (2004)
The Mathworks Inc: Matlab. http://www.mathworks.com/ (2014)
Wen, Y.K.: Equivalent linearization for hysteretic systems under random excitation. ASME J. Appl. Mech. 47, 150–154 (1980)
Wright, J.P., Pei, J.S.: Solving dynamical systems involving piecewise restoring force using state event location. ASCE J. Eng. Mech. 138(8), 997–1020 (2012)
Acknowledgements
The first author would like to acknowledge the Vice President for Research of the University of Oklahoma for the support of the Faculty Investment Program.
Author information
Authors and Affiliations
Corresponding author
Appendix for Section 2
Appendix for Section 2
1.1 Bouc–Wen model
The formula for a Bouc-Wen (BW) model [2, 31] focusing on the auxiliary
where \(\eta \), A, \(\nu \), \(\beta \), \(\gamma \) are model parameters, \(\dot{x}\) is the velocity (r is denoted as z by many authors). A numerical example is given in Fig. 11.

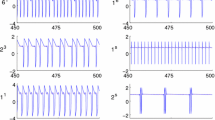
One Bouc–Wen model with \(\eta = 10\), \(A = 1\), \(\nu = 1\), \(\beta = 0.5\), \(n = 5\), \(\gamma = 0.5\) in Eq. (30) and subject to input \(\dot{x} = \frac{t}{100} \sin (2\pi \frac{t}{100})\). r(t) is solved from Eq. (30) using the state-event location algorithm [26] implemented to MATLAB ode45 under “Events” option with \({{\mathrm{RelTol}}}= 10^{-6}\), \({{\mathrm{AbsTol}}}= 10^{-12}\), and \({{\mathrm{Refine}}}= 1\)
We have the following pair of equations for the integral quantities:
In general, Eqs. (31) and (32) do not have closed-form expressions. However, it can be shown that these two integral equations define a one-to-one mapping \(r \mapsto x\) like those one-to-one mappings in the algebraic forms of \(p \mapsto x\) and \(p \mapsto a\) for an effort-controlled memristor and memcapacitor in Tables 2 and 4, respectively. In this sense, BW is an effort-controlled model.
The differential pair is as follows:
Adopting our notation from the effort-controlled mem-models again, we write:
where
with \(\dot{x} (t_i) = 0\), the velocity turning points. These are also restoring force turning points because \(\dot{r} (t_i) = 0\) based on Eqs. (33) and (34).
Historically and as reviewed in [2, 11] proposed the following equation:
where \({\mathcal {F}}\) is a function representing restoring force. This equation bears similarity to Eq. (36) but is more general. Interestingly, an equation as general as Eq. (38) has not been as populated as its later development (i.e., the Bouc–Wen model) given the difficulty in deriving its explicit integral solution. The proposed differential pair for BW can thus be considered as a renewed interest in this historically important piece of work.
1.2 Bilinear hysteresis model
Bilinear hysteresis model [4, 5] is selected given that it can represent piecewise smooth hysteresis models defined by simple switching rules [32]. See Fig. 12 for a simulated example.

One bilinear hysteresis model with two stiffness values 5 and 0.25, \(r_{\text {yield}} = 0.5\), and subject to input \(\dot{r}(t) = \frac{t}{1000} \sin (2\pi \frac{t}{100})\). x(t) is solved by using the state-event location algorithm [26] implemented to MATLAB ode45 under “Events” option with \({{\mathrm{RelTol}}}= 10^{-6}\) and \({{\mathrm{AbsTol}}}= 10^{-12}\), and \({{\mathrm{Refine}}}= 1\)
Each piece (i.e., branch) is a straight line in (x, r). The numerical challenge of this model (indeed of any switching model) resides in treating all discontinuities (switching points)—called state events—since each discontinuity’s location in time depends on the input. In practice, the time locations of switching points are unknown and must be found in sequence as time advances. Even though there are different types of state events (see [23]), we only pay attention to one type in this dual-pair example so as to make a connection to hybrid dynamical systems.
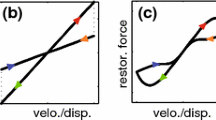
In Fig. 12, this model shows an especially simple differential pair (\(\dot{x}\), \(\dot{r}\)). For this piecewise linear model, even though the integral pair exhibits complicated input-dependent looping behavior, the differential pair consists of two straight lines through the origin, whose slopes are the same as the two tangent stiffness values in the integral pair.

One classical Preisach model using the MATLAB GUI provided in [12] with input \(r(t) = 0.0125 t \sin (t)\). The highlight is the flag-shaped hysteresis shown in the differential pairs at the lower left corner
1.3 Classical Preisach model
Classical Preisach model probably is among the most celebrated hysteresis models in engineering and beyond. Even though there is no mention of the proposed dual-pair concept, there is indeed a relevant way of thinking in the literature. For a Preisach model defined as follows in [28]:
\(\gamma \) represents a hysteron with switching down field \(h_1\) and switching up field \(h_2\), T denotes the Preisach triangle, and \(\nu \left( h_1, h_2 \right) \) is the two-dimensional Preisach function. In [15, 28, 29], consecutive “turning points” of the field history are used. In [28], \(\frac{\hbox {d}B}{\hbox {d}H}\), a quantity defined as dynamic permeability or susceptibility, plays an important role in circuit and electromagnetic field computation problems and can be a three-dimensional tensor.

Same classical Preisach model as in Fig. 13 but subject to a different input time history of r(t), a sinusoidal wave multiplied with a windowing function as plotted. The highlight are the two minor loops demonstrating the congruency property of a classical Preisach model and their counterparts in the differential pair
“With the aid of the Preisach model, the dynamic permeability for increasing magnetic field intensity can be expressed as:
and for decreasing magnetic field intensity
In these relations, \(H_r\) is the last dominant extremum of the magnetic field intensity” [28]. A trivial manipulation involving time leads to the following symbolic expression for both increasing and decreasing situations:
Following Chapter 11 in [16], B and H may be analogous to x and r, respectively. Adopting the mem-model notation (again), we write:
where \(r_{[i]}\) denotes the last dominant extremum of r.
To further validate the proposed dual-pair concept, numerical examples given in Figs. 13 and 14 are for one classical Preisach model under two different piecewise monotonic inputs. Using piecewise monotonic inputs is not uncommon for Preisach models, e.g., the congruency property is proved by considering a monotonically increasing/decreasing input [19].
Rights and permissions
About this article

Cite this article
Pei, JS., Gay-Balmaz, F., Wright, J.P. et al. Dual input–output pairs for modeling hysteresis inspired by mem-models. Nonlinear Dyn 88, 2435–2455 (2017). https://doi.org/10.1007/s11071-017-3388-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3388-2