
Abstract
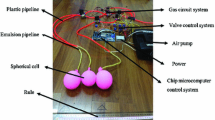
A modular multi-spherical soft robot, which consists of five deformable spherical cells, two friction feet, the electromagnetic valves and the control systems, is constructed. According to the deflating action and the inflating action of the spherical cells, the size and the shape of each spherical cell can be changed. With two friction feet sticking with the ground in turn, the soft robot can move forwards, make a turning motion and avoid the obstacle. This paper creates a nonlinear relation between the pressure P and the inflation radius \(\left( r \right) \) at different original radii \(\left( {r_0 } \right) \) and obtains the inflation or deflation velocity \(v_r \). Six inflating and deflating steps to finish the turning motion are presented. Based on the geometric relationship between the inflation radius (r) and the original radius \((r_0 )\) of each cell, the nonlinear turning process is described to control the center positions (x, y, z) of the spherical cell. Last, a simulation and an experiment of five spherical cells are shown to emulate the turning process. Experiment results show that the robot has a maximum turning capability of \(20{^{\circ }}\) in one period.













Similar content being viewed by others


References
Kim, S., Laschi, C., Trimmer, B.: Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 31(5), 287–294 (2013)
Fei, Y.Q., Shen, X.Y.: Nonlinear analysis on moving process of soft robots. Nonlinear Dyn. 73(1–2), 672–677 (2013)
Trimmer, B., Lin, H., Amanda, B., Leisk, G. G., Kaplan, D. L.: Towards a biomorphic soft robot: design constraints and solutions. In: Proceedings 4th International Conference on Biomedical Robotics and Biomechatronics (BioRob). Rome, Italy, pp. 599–605. (2012)
Onal, C.D., Rus, D.: Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspiration Biomim. 8(2), 026003 (2013)
Cecilia, L., Matteo, C., Barbara, M., Laura, M., Maurizio, F., Paolo, D.: Soft robot arm inspired by the octopus. Adv. Robot. 26, 709–727 (2012)
Manti, M., Hassan, T., Passetti, G., D’Elia, N., Cianchetti, M., Laschi, C.: An under-actuated and adaptable soft robotic gripper. Biomim. Biohybrid Syst. 9222, 64–74 (2015)
Fei, Y.Q., Gao, H.W.: Nonlinear dynamic modeling on multi-spherical modular soft robots. Nonlinear Dyn. 78, 831–838 (2014)
Calisti, M., Arienti, A., Renda, F., Levy, G., Hochner, B., Mazzolai, B., Dario, P., Laschi, C.: Design and development of a soft robot with crawling and grasping capabilities. In: Proceedings of 2012 IEEE International Conference Robotics Automation, pp. 4950–4955. Saint Paul, MN. (2012)
Koizumi, Y., Shibata, M., Hirai, S.: Rolling tensegrity driven by pneumatic soft actuators. Proceedings of 2012 IEEE International Conference Robotics Automation, pp. 1988–1993 . Saint Paul, MN (2012)
Sugiyama, Y., Hirai, S.: Crawling and jumping by a deformable robot. Int. J. Robot. Res. 25(5–6), 603–620 (2006)
Yao, J., Di, D., Gao, S., He, L., Hu, S.: Sliding mode control scheme for a jumping robot with multi-joint based on floating basis. Int. J. Control 85(1), 41–49 (2012)
Marchese, A., D., Onal, C. D., Rus, D.: Soft robot actuators using energy-efficient valves controlled by electropermanent magnets. In: Proceedings of IEEE/RSJ International Conference Intelligent Robots Systems, pp. 756–761. San Francisco, CA (2011)
Teruyoshi, O., Taro, N.: Path tracking method for traveling-wave-type omnidirectional mobile robot (TORoIII). J. Robot. Mech. 24(2), 340–346 (2012)
Koh, J., Lee, D., Kim, S., Cho, K.: Deformable soft wheel robot using hybrid actuation. In: Proceedings of IEEE/RSJ International Conference Intelligent Robots System, pp. 3869–3870. (2012)
Hou, J.P., Lou, M.Z., Luo, T., M.: The design and control of amoeba-like robot. In: Proceedings of International Conference on Computer Application and System Modeling, pp. 8–91. ICCASM, Shan Xi. China (2010)
Shepherd, R.F., Stokes, A.A., Freake, J., et al.: Using explosions to power a soft robot. Angewandte Chem. 125(10), 2892–2896 (2013)
Huang, C., Lv, J. A., Tian, X., Wang, Y., Yu, Y., Liu, J.: Miniaturized swimming soft robot with complex movement actuated and controlled by remote light signals. Scientific reports 5 (2015)
Beatty, M.F.: Topics in finite elasticity: hyperelasticity of rubber, elastomers, and biological tissues—with examples. Appl. Mech. Rev. 40, 1699–1734 (1987)
Acknowledgements
This research was supported by National Natural Science Foundation of China (Grant No. 51475300) and Open Foundation of First Level Zhejiang Key in Key Discipline of Control Science and Engineering.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Fei, Y., Pang, W. Analysis on nonlinear turning motion of multi-spherical soft robots. Nonlinear Dyn 88, 883–892 (2017). https://doi.org/10.1007/s11071-016-3282-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3282-3