
Abstract
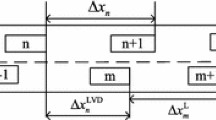
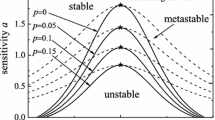
This paper presents an extended car-following model, which can be used to describe the dynamic characteristics of mixed traffic with pedestrians walking on adjacent lane. The proposed model is based on the optimal velocity function by taking into account two additional stimuli generated by adjacent pedestrians, i.e., the lateral and longitudinal headways between the observed car and the preceding pedestrian. By using the linear stability theory, this paper first derives the stability condition and plots the neutral stability curves with the model-related parameters. Then through the reductive perturbation method, we obtain the soliton solution of the modified Korteweg–de Vries equation near the critical point and depict the coexisting curve which divides the traffic flow state into three types (i.e., stable, metastable and unstable state) along with the corresponding neutral stability curve. Numerical results demonstrate that the proposed model can effectively characterize traffic following behaviors under the mixed-pedestrian–vehicle situation.









Similar content being viewed by others

References
Prigogine, I., Herman, R.C.: Kinetic Theory of Vehicular Traffic. Elsevier Press, New York (1971)
Nagatani, T.: Jamming transition of high-dimensional traffic dynamics. Phys. A 272(3), 592–611 (1999)
Treiber, M., Hennecke, A., Helbing, D.: Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 62(2), 1805–1824 (2000)
Nagatani, T.: The physics of traffic jams. Rep. Prog. Phys. 65(9), 1331–1386 (2002)
Treiber, M., Kesting, A., Helbing, D.: Delays, inaccuracies and anticipation in microscopic traffic models. Phys. A 360(1), 71–88 (2006)
Ngoduy, D.: Analytical studies on the instabilities of heterogeneous intelligent traffic flow. Commun. Nonlinear Sci. Numer. Simul. 18(10), 2699–2706 (2013)
Ngoduy, D.: Generalized macroscopic traffic model with time delay. Nonlinear Dyn. 77(1), 289–296 (2014)
Yu, S.W., Zhao, X.M., Xu, Z.G., Shi, Z.K.: An improved car-following model considering the immediately ahead cars velocity difference. Phys. A 461, 446–455 (2016)
Whitham, G.B.: The effects of hydraulic resistance in the dam-break problem. Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences 227, 399–407 (1955)
Ngoduy, D., Wilson, R.E.: Multianticipative nonlocal macroscopic traffic model. Comp.-Aided Civ. Infrastruct. Eng. 29(4), 248–263 (2014)
Helbing, D.: A section-based queueing-theoretical traffic model for congestion and travel time analysis in networks. J. Phys. A: Math. Gen. 36(46), 593–598 (2003)
Carlson, R.C., Papamichail, I., Papageorgiou, M., Messmer, A.: Optimal mainstream traffic flow control of large-scale motorway networks. Transp. Res. Part C: Emerg. Technol. 18(2), 193–212 (2010)
Gazis, D.C., Herman, R., Potts, R.B.: Car-following theory of steady-state traffic flow. Oper. Res. 7(4), 499–505 (1959)
Tang, T.Q., Shi, W.F., Shang, H.Y., Wang, Y.P.: A new car-following model with consideration of inter-vehicle communication. Nonlinear Dyn. 76(4), 2017–2023 (2014)
Peng, G.H., Sun, D.H.: A dynamical model of car-following with the consideration of the multiple information of preceding cars. Phys. Lett. A 374(15), 1694–1698 (2010)
Jiang, R., Wu, Q.S., Zhu, Z.J.: A new continuum model for traffic flow and numerical tests. Transp. Res. Part B: Methodol. 36(5), 405–419 (2002)
Zhou, J., Shi, Z.K., Cao, J.L.: Nonlinear analysis of the optimal velocity difference model with reaction-time delay. Phys. A 396, 77–87 (2014)
Yu, S.W., Liu, Q.L., Li, X.H.: Full velocity difference and acceleration model for a car-following theory. Commun. Nonlinear Sci. Numer. Simul. 18(5), 1229–1234 (2013)
Zhou, J., Shi, Z.K., Cao, J.L.: An extended traffic flow model on a gradient highway with the consideration of the relative velocity. Nonlinear Dyn. 78(3), 1765–1779 (2014)
Tang, T.Q., Shi, W.F., Shang, H.Y., Wang, Y.P.: An extended car-following model with consideration of the reliability of inter-vehicle communication. Measurement 58, 286–293 (2014)
Schadschneider, A., Schreckenberg, M.: Cellular automation models and traffic flow. J. Phys. A: Math. Gen. 26(15), 679–683 (1998)
Nagel, K., Schreckenberg, M.: A cellular automaton model for freeway traffic. J. Phys. I 2(12), 2221–2229 (1992)
Duff, T.J., Chong, D.M., Tolhurst, K.G.: Using discrete event simulation cellular automata models to determine multi-mode travel times and routes of terrestrial suppression resources to wildland fires. Eur. J. Oper. Res. 241(3), 763–770 (2015)
Hsu, J.J., Chu, J.C.: Long-term congestion anticipation and aversion in pedestrian simulation using floor field cellular automata. Transp. Res. Part C: Emerg. Technol. 48, 195–211 (2014)
Bando, M., Hasebe, K., Nakanishi, K., Nakayama, A.: Analysis of optimal velocity model with explicit delay. Phys. Rev. E 58(5), 5429–5450 (1998)
Ge, H.X., Dai, S.Q., Dong, L.Y., Xue, Y.: Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application. Phys. Rev. E 70(6), 1–6 (2004)
Masakuni, M., Nagatani, T.: Soliton and kink jams in traffic flow with open boundaries. Phys. Rev. E 60(1), 180–187 (1999)
Reuschel, A.: Vehicle movements in a platoon with uniform acceleration or deceleration of the lead vehicle. Zeitschrift des Oesterreichischen Ingenieur-und Architekten-Vereines 95, 50–62 (1950)
Pipes, L.A.: An operational analysis of traffic dynamics. J. Appl. Phys. 24(3), 274–281 (1953)
Chandler, R.E., Herman, R., Montroll, E.W.: Traffic dynamics: studies in car following. Oper. Res. 6(2), 165–184 (1958)
Newell, G.F.: Nonlinear effects in the dynamics of car following. Oper. Res. 9(2), 209–229 (1961)
Bando, M., Hasebe, K., Nakayama, A., Shibata, A., Sugiyama, Y.: Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 51(2), 1035–1045 (1995)
Nagatani, T.: Stabilization and enhancement of traffic flow by the next-nearest-neighbor interaction. Phys. Rev. E 60(6), 6395–6401 (1999)
Treiber, M., Hennecke, A., Helbing, D.: Derivation, properties, and simulation of a gas-kinetic-based, non-local traffic model. Phys. Rev. E 59(1), 239–253 (1999)
Tang, T.Q., Huang, H.J., Gao, Z.Y.: Stability of the car-following model on two lanes. Phys. Rev. E 72(066124), 1–7 (2005)
Ge, H.X., Meng, X.P., Ma, J., Lo, S.M.: An improved car-following model considering influence of other factors on traffic jam. Phys. Lett. A 377(1), 9–12 (2012)
Yu, G.Z., Wang, P.C., Wu, X.K., Wang, Y.P.: Linear and nonlinear stability analysis of a car-following model considering velocity difference of two adjacent lanes. Nonlinear Dyn. 84(1), 1–11 (2015)
Lv, W., Song, W.G., Fang, Z.M.: Three-lane changing behaviour simulation using a modified optimal velocity model. Phys. A 390(12), 2303–2314 (2011)
Jiang, R., Wu, Q.S., Zhu, Z.: Full velocity difference model for a car-following theory. Phys. Rev. E 64(017101), 1–4 (2001)
Helbing, D., Tilch, B.: Generalized force model of traffic dynamics. Phys. Rev. E 58(1), 133–138 (1998)
Yu, S., Shi, Z.: Dynamics of connected cruise control systems considering velocity changes with memory feedback. Measurement 64, 34–48 (2015)
Yu, S.W., Shi, Z.K.: An extended car-following model considering vehicular gap fluctuation. Measurement 70, 137–147 (2015)
Yu, S.W., Shi, Z.K.: An extended car-following model at signalized intersections. Phys. A 407, 152–159 (2014)
Zhou, J.: An extended visual angle model for car-following theory. Nonlinear Dyn. 81(1), 549–560 (2015)
Peng, G.H., Cheng, R.J.: A new car-following model with the consideration of anticipation optimal velocity. Phys. A 392(17), 3563–3569 (2013)
Yu, S.W., Shi, Z.K.: An improved car-following model considering relative velocity fluctuation. Commun. Nonlinear Sci. Numer. Simul. 36, 319–326 (2016)
Li, X., Sun, J.Q.: Studies of vehicle lane-changing to avoid pedestrians with cellular automata. Phys. A 438, 251–271 (2015)
Anvari, B., Bell, M.G., Sivakumar, A., Ochieng, W.Y.: Modelling shared space users via rule-based social force model. Transp. Res. Part C: Emerg. Technol. 51, 83–103 (2015)
Helbing, D., Jiang, R., Treiber, M.: Analytical investigation of oscillations in intersecting flows of pedestrian and vehicle traffic. Phys. Rev. E 72(4), 1–11 (2005)
Chen, P., Wu, C.Z., Zhu, S.Y.: Interaction between vehicles and pedestrians at uncontrolled mid-block crosswalks. Saf. Sci. 82, 68–76 (2016)
Zhang, X., Chang, G.L.: A dynamic evacuation model for pedestrian-vehicle mixed-flow networks. Transp. Res. Part C: Emerg. Technol. 40, 75–92 (2014)
Ito, H., Nishinari, K.: Totally asymmetric simple exclusion process with a time-dependent boundary: interaction between vehicles and pedestrians at intersections. Phys. Rev. E 89(4), 1–25 (2014)
Xin, X.Y., Jia, N., Zheng, L., Ma, S.F.: Power-law in pedestrian crossing flow under the interference of vehicles at an un-signalized midblock crosswalk. Phys. A 406, 287–297 (2014)
Jin, S., Qu, X.B., Xu, C., Wang, D.H.: Dynamic characteristics of traffic flow with consideration of pedestrians road-crossing behavior. Phys. A 392(18), 3881–3890 (2013)
Jiang, R., Wu, Q.S.: The moving behavior of a large object in the crowds in a narrow channel. Phys. A 364, 457–463 (2006)
Jiang, R., Wu, Q.S.: Interaction between vehicle and pedestrians in a narrow channel. Phys. A 368(1), 239–246 (2006)
Chowdhury, D., Santen, L., Schadschneider, A.: Statistical physics of vehicular traffic and some related systems. Phys. Rep. 329(4), 199–329 (2000)
Peng, G.H., Sun, D.H.: Multiple car-following model of traffic flow and numerical simulation. Chin. Phys. B 18(12), 5420–5430 (2009)
Whitham, G.B.: Exact solutions for a discrete system arising in traffic flow. Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences 428, 49–69 (1990)
Tian, J.F., Jia, B., Li, X.G., Gao, Z.Y.: A new car-following model considering velocity anticipation. Chin. Phys. B 19(1), 1–7 (2010)
Sawada, S.: Generalized optimal velocity model for traffic flow. Int. J. Mod. Phys. C 13(1), 1–12 (2002)
Li, Y.F., Zhang, L., Zheng, H., He, X.Z., Peeta, S., Zheng, T.X., Li, Y.G.: Evaluating the energy consumption of electric vehicles based on car-following model under non-lane discipline. Nonlinear Dyn. 82(1), 629–641 (2015)
Jin, S., Wang, D.H., Tao, P.F., Li, P.F.: Non-lane-based full velocity difference car following model. Phys. A 389(21), 4654–4662 (2010)
Yu, X.: Analysis of the stability and density waves for traffic flow. Chin. Phys. 11(11), 1128–1134 (2002)
Li, Z.P., Liu, Y.C.: Analysis of stability and density waves of traffic flow model in an its environment. Euro. Phys. J. B-Condens. Matter Complex Syst. 53(3), 367–374 (2006)
Nagatani, T.: Traffic jams induced by fluctuation of a leading car. Phys. Rev. E 61(4), 3534–3540 (2000)
Nagatani, T., Nakanishi, K., Emmerich, H.: Phase transition in a difference equation model of traffic flow. J. Phys. A: Math. Gen. 31(24), 5431–5438 (1998)
Ge, H.X., Cheng, R.J., Dai, S.Q.: KdV and kink–antikink solitons in car-following models. Phys. A 357(3), 466–476 (2005)
Zheng, L.J., Tian, C., Sun, D.H., Liu, W.N.: A new car-following model with consideration of anticipation driving behavior. Nonlinear Dyn. 70(2), 1205–1211 (2012)
Liu, F., Cheng, R., Zheng, P., Ge, H.: TDGL and mKdV equations for car-following model considering traffic jerk. Nonlinear Dyn. 83(1), 793–800 (2016)
Tomer, E., Safonov, L., Havlin, S.: Presence of many stable nonhomogeneous states in an inertial car-following model. Phys. Rev. Lett. 84, 382–385 (2000)
Berg, P., Mason, A., Woods, A.: Continuum approach to car-following models. Phys. Rev. E 61, 1056–1066 (2000)
Lee, H.K., Lee, H.W., Kim, D.: Macroscopic traffic models from microscopic car-following models. Phys. Rev. E 64(056126), 1–12 (2001)
Kurtze, D.A., Hong, D.C.: Traffic jams, granular flow, and soliton selection. Phys. Rev. E 52(1), 218–221 (1995)
Kerner, B.S., Konhäuser, P.: Cluster effect in initially homogeneous traffic flow. Phys. Rev. E 48(4), 2335–2338 (1993)
Ge, H.X., Cheng, R.J., Li, Z.P.: Two velocity difference model for a car following theory. Phys. A 387(21), 5239–5245 (2008)
Nagatani, T.: Modified KdV equation for jamming transition in the continuum models of traffic. Phys. A 261(3), 599–607 (1998)
Jia, Y.H., Du, Y.M., Wu, J.P.: Stability analysis of a car-following model on two lanes. Math. Probl. Eng. 2014, 1–9 (2014)
Nagatani, T.: Density waves in traffic flow. Phys. Rev. E 61(4), 3564–3570 (2000)
Ge, H.X., Dai, S.Q., Xue, Y., Dong, L.Y.: Stabilization analysis and modified Korteweg-de Vries equation in a cooperative driving system. Phys. Rev. E 71(6), 1–7 (2005)
Konishi, K., Kokame, H., Hirata, K.: Coupled map car-following model and its delayed-feedback control. Phys. Rev. E 60(4), 4000–4007 (1999)
Tadaki, S., Kikuchi, M., Sugiyama, Y., Yukawa, S.: Coupled map traffic flow simulator based on optimal velocity functions. J. Phys. Soc. Jpn. 67(7), 2270–2276 (1998)
Bando, M., Hasebe, K., Nakanishi, K., Nakayama, A., Shibata, A., Sugiyama, Y.: Phenomenological study of dynamical model of traffic flow. J. Phys. I 5(11), 1389–1399 (1995)
Carey, N.: Establishing pedestrian walking speeds. Tech. rep. (2005)
Edward, H.: The Hidden Dimension. Doubleday, Garden City (1966)
Ge, H.X.: Modified coupled map car-following model and its delayed feedback control scheme. Chin. Phys. B 20(9), 1–9 (2011)
Acknowledgements
This research was supported by the National Key Research and Development Program of China (2016YFB0100902).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, P., Yu, G., Wu, X. et al. Linear and nonlinear stability analysis of an extended car-following model considering pedestrians on adjacent lane. Nonlinear Dyn 88, 777–789 (2017). https://doi.org/10.1007/s11071-016-3275-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3275-2