
Abstract
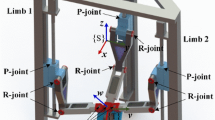
A 2-URR-RRU parallel manipulator has two rotational degrees of freedom (DOF) and one translational DOF, where U denotes a universal joint and R a revolute joint. The 2-URR-RRU parallel manipulator has promising engineering potentials. However, investigations on its kinematics, dynamics and optimal design are deficient, which tremendously hinders its application. This paper presents the kinematic/dynamic modeling and motion/force performance-based optimization of the 2-URR-RRU parallel manipulator. Firstly two rotation axes and one translation direction are found by mobility analysis based on screw theory. Then forward/inverse kinematic models are constructed for position analysis. Based on the kinematics, dynamics modeling is established through the Newton–Euler method. The Jacobian matrix, which relates the velocity of actuators and that of the end-effector, is deduced to investigate the singularity of the parallel manipulator. Analysis reveals that this manipulator only has inverse singularities, with no forward or combined singularities. In addition, its workspace is obtained with a compromise of main practical limitations. Furthermore, force/motion performance indices are employed for optimization of geometrical parameters. This study brings valuable kinematic/dynamic insights of the 2-URR-RRU parallel manipulator and is fundamental to further research in stiffness analysis and control system design.















Similar content being viewed by others


References
Clavel, R.: Delta, a fast robot with parallel geometry. In: Proc. Int. Symp. on Industrial Robots Lausanne, pp. 91–100 (1988)
Wahl, J.: Articulated tool head. WIPO Patent No. WO/2000/025976 (2002)
Siciliano, B.: The tricept robot: inverse kinematics, manipulability analysis and closed-loop direct kinematics algorithm. Robotica 17, 437–445 (1999)
Hunt, K.H.: Structural kinematics of in-parallel-actuated robot-arms. J. Mech. Des. 105, 705–712 (1983)
Carretero, J.A., Nahon, M., Buckham, B., Gosselin, C.M.: Kinematic analysis of a three-DOF parallel mechanism for telescope applications. In: Proc ASME Design Engineering Technical Conf. (1997)
Pouliot, N.A., Gosselin, C.M., Nahon, M.A.: Motion simulation capabilities of three-degree-of-freedom flight simulators. J. Aircr. 35, 9–17 (2012)
Yu, J., Hu, Y., Bi, S., Zong, G., Zhao, W.: Kinematics feature analysis of a 3-DOF compliant mechanism for micro manipulation. Chin. J. Mech. Eng. 17, 127–131 (2004)
Liu, D., Che, R., Li, Z., Luo, X.: Research on the theory and the virtual prototype of 3-DOF parallel-link coordinate-measuring machine. In: Instrumentation and Measurement Technology Conference, 2001. IMTC 2001. Proceedings of the 18th IEEE, vol. 922, pp. 926–930 (2001)
Lee, K.M., Shah, D.: Kinematic analysis of a three degrees of freedom in-parallel actuated manipulator. In: IEEE International Conference on, Robotics and Automation. Proceedings, pp. 345–350 (1987)
Tsai, M.S., Shiau, T.N., Tsai, Y.J., Chang, T.H.: Direct kinematic analysis of a 3-PRS parallel mechanism. Mech. Mach. Theory 38, 71–83 (2003)
Li, Y., Xu, Q.: Kinematic analysis of a 3-PRS parallel manipulator. Robot. Comput. Integr. Manuf. 23, 395–408 (2007)
Han, S.K., Tsai, L.W.: Kinematic synthesis of a spatial 3RPS parallel manipulator. J. Mech. Des. 125, 92–97 (2003)
Rao, N.M.R.M.: Multiposition dimensional synthesis of a spatial 3RPS parallel manipulator. J. Mech. Des. 128, 815–819 (2006)
Rao, N.M., Rao, K.M.: Dimensional synthesis of a spatial 3-RPS parallel manipulator for a prescribed range of motion of spherical joints. Mech. Mach. Theory. 44, 477–486 (2009)
Liu, X.J., Bonev, I.A.: Orientation capability, error analysis, and dimensional optimization of two articulated tool heads with parallel kinematics. J. Manuf. Sci. Eng. 130, 284–284 (2008)
Joshi, S.A., Tsai, L.W.: Jacobian analysis of limited-DOF parallel manipulators. In: ASME 2002 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers, pp. 341–348 (2002)
Liu, C.H.: Direct singular positions of 3RPS parallel manipulators. ASME Trans. J. Mech. Des. 126(6), 1006–1016 (2004)
Lee, K.M., Shah, D.K.: Dynamic analysis of a three-degrees-of-freedom in-parallel actuated manipulator. IEEE J. Robot. Autom. 4, 361–367 (1988)
Farhat, N., Mata, V., Page, A., Valero, F.: Identification of dynamic parameters of a 3-DOF RPS parallel manipulator. Mech. Mach. Theory 43, 1–17 (2008)
Li, Q., Hervé, J.M.: 1T2R parallel mechanisms without parasitic motion. IEEE Trans. Robot. 26, 401–410 (2010)
Carretero, J.A., Podhorodeski, R.P., Nahon, M.A., Gosselin, C.M.: Kinematic analysis and optimization of a new three degree-of-freedom spatial parallel manipulator. ASME J. Mech. Des. 122(1), 17–24 (2000)
Kong, X., Gosselin, C.M.: Type synthesis of three-DOF up-equivalent parallel manipulators using a virtual-chain approach. In: Advances in Robot Kinematics, pp. 123–132 (2005)
Li, Q., Herve, J.M.: Type synthesis of 3-DOF RPR-equivalent parallel mechanisms. IEEE Trans. Robot. 30, 1333–1343 (2014)
Jin, Y., Kong, X., Higgins, C., Price, M.: Kinematic design of a new parallel kinematic machine for aircraft wing assembly. In: 10th IEEE International Conference on Industrial Informatics (INDIN), pp. 669–674 (2012)
Ball, R.S.: A Treatise on the Theory of Screws. Cambridge University Press, Cambridge (1998)
Gosselin, C.: Parallel computational algorithms for the kinematics and dynamics of planar and spatial parallel manipulators. J. Dyn. Syst. Meas. Control 118(1), 22–28 (1996)
Glazunov, V., Kheylo, S.: Dynamics and control of planar, translational, and spherical parallel manipulators.In: Dynamic Balancing of Mechanisms and Synthesizing of Parallel Robots (2016)
Gosselin, C., Angeles, J.: Singularity analysis of closed-loop kinematic chains. IEEE Trans. Robot. Autom. 6, 281–290 (1990)
Wang, J., Wu, C., Liu, X.J.: Performance evaluation of parallel manipulators: motion/force transmissibility and its index. Mech. Mach. Theory. 45, 1462–1476 (2010)
Wang, J., Liu, X.J., Wu, C.: Optimal design of a new spatial 3-DOF parallel robot with respect to a frame-free index. Sci. China 52(4), 986–999 (2009)
Liu, X.J., Xie, F., Bonev, I.A., Wang, L.P.: Design of a three-axis articulated tool head with parallel kinematics achieving desired motion/force transmission characteristics. J. Manuf. Sci. Eng. 132, 237–247 (2010)
Wu, C., et al.: Optimal design of spherical 5R parallel manipulators considering the motion/force transmissibility. J. Mech. Des. 132(3), 031002 (2010)
Acknowledgements
The authors would like to acknowledge the financial support of the National Natural Science Foundation of China (NSFC) under Grant 51525504, 51475431 and Natural Science Foundation of Zhejiang Province under Grant LZ14E050005.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, Z., Zhang, N., Chai, X. et al. Kinematic/dynamic analysis and optimization of a 2-URR-RRU parallel manipulator. Nonlinear Dyn 88, 503–519 (2017). https://doi.org/10.1007/s11071-016-3256-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3256-5