
Abstract
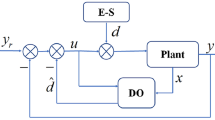
In this paper, a novel composite control, using fuzzy logic system (FLS) and disturbance observer, is proposed for a class of uncertain nonlinear systems with actuator saturation and external disturbances. FLS is employed to approximate the unknown nonlinearities and a serial–parallel identification model is introduced to construct the composite updating law. The disturbance observer is developed to estimate the unknown compounded disturbance composed of the unknown external disturbance, the unknown fuzzy approximation error and the effect of actuator saturation. The uniformly ultimate boundedness of the closed-loop tracking error can be guaranteed rigorously via Lyapunov stability analysis. Simulation results are presented to demonstrate the effectiveness of the proposed method.











Similar content being viewed by others
References
Bayramoglu, H., Komurcugil, H.: Time-varying sliding-coefficient-based terminal sliding mode control methods for a class of fourth-order nonlinear systems. Nonlinear Dyn. 73(3), 1645–1657 (2013)
Bum Yong Park, S.W.Y., Park, P.: \(H_2\) state-feedback control for lpv systems with input saturation and matched disturbance. Nonlinear Dyn. 67(2), 1083–1096 (2012)
Chen, B., Lee, C., Chang, Y.: \(H^{\infty }\) tracking design of uncertain nonlinear SISO systems: adaptive fuzzy approach. IEEE Trans. Fuzzy Syst. 4(1), 32–43 (1996)
Chen, M., Chen, W.: Sliding mode control for a class of uncertain nonlinear system based on disturbance observer. Int. J. Adapt. Control Signal Process. 24(1), 51–64 (2010)
Chen, M., Ge, S., How, B.: Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities. IEEE Trans. Neural Netw. 21(5), 796–812 (2010)
Chen, M., Ge, S.S.: Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer. IEEE Trans. Cybern. 43(4), 1213–1225 (2013)
Chen, M., Ge, S.S., Ren, B.: Adaptive tracking control of uncertain mimo nonlinear systems with input constraints. Automatica 47(3), 452–465 (2011)
Farrell, J., Sharma, M., Polycarpou, M.: Backstepping-based flight control with adaptive function approximation. J. Guid. Control Dyn. 28(6), 1089–1102 (2005)
Hamzaoui, A., Essounbouli, N., Benmahammed, K., Zaytoon, J.: State observer based robust adaptive fuzzy controller for nonlinear uncertain and perturbed systems. IEEE Trans. Syst. Man. Cybern. Part B Cybern. 34(2), 942–950 (2004)
Hojati, M., Gazor, S.: Hybrid adaptive fuzzy identification and control of nonlinear systems. IEEE Trans. Fuzzy Syst. 10(2), 198–210 (2002)
Kim, E.: A discrete-time fuzzy disturbance observer and its application to control. IEEE Trans. Fuzzy Syst. 11, 399–410 (2003)
Kung, C., Chen, T.: Observer-based indirect adaptive fuzzy sliding mode control with state variable filters for unknown nonlinear dynamical systems. Fuzzy Sets Syst. 155(2), 292–308 (2005)
Li, Y., Tong, S.: Adaptive fuzzy output-feedback control of pure-feedback uncertain nonlinear systems with unknown dead-zone. IEEE Trans. Fuzzy Syst. doi:10.1109/TFUZZ.2013.2280146
Liu, Y., Chen, C., Wen, G., Tong, S.: Adaptive neural output feedback tracking control for a class of uncertain discrete-time nonlinear systems. IEEE Trans. Neural Netw. 22(7), 1162–1167 (2011)
Liu, Y.J., Zheng, Y.Q.: Adaptive robust fuzzy control for a class of uncertain chaotic systems. Nonlinear Dyn. 57(3), 431–439 (2009)
Pan, Y., Er, M.J., Sun, T.: Composite adaptive fuzzy control for synchronization of generalized lorenz systems. Chaos 22(2), 1–10 (2012)
Pan, Y., Zhou, Y., Sun, T., Joo Er, M.: Composite adaptive fuzzy \(H^{\infty }\) tracking control of uncertain nonlinear systems. Neurocomputing 99, 15–24 (2013)
Phan, P.A., Gale, T.: Two-mode adaptive fuzzy control with approximation error estimator. IEEE Trans. Fuzzy Syst. 15(5), 943–955 (2007)
Tong, S., He, X., Zhang, H.: A combined backstepping and small-gain approach to robust adaptive fuzzy output feedback control. IEEE Trans. Fuzzy Syst. 17(5), 1059–1069 (2009)
Tong, S.C., Li, Q., Chai, T.: Fuzzy adaptive control for a class of nonlinear systems. Fuzzy Sets Syst. 101(1), 31–39 (1999)
Wang, L.: Design and analysis of fuzzy identifiers of nonlinear dynamic systems. IEEE Trans. Autom. Control 40(1), 11–23 (1995)
Xu, B., Huang, X., Wang, D., Sun, F.: Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation. Asian J. Control 16(1), 162–174 (2014)
Xu, B., Shi, Z., Yang, C., Sun, F.: Composite neural dynamic surface control of a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Cybern. 14(12), 2626–2634 (2014)
Xu, B., Shi, Z., Yang, C., Wang, S.: Neural control of hypersonic flight vehicle model via time-scale decomposition with throttle setting constraint. Nonlinear Dyn. 73(3), 1849–1861 (2013)
Xu, B., Yang, C., Shi, Z.: Reinforcement learning output feedback nn control using deterministic learning technique. IEEE Trans. Neural Netw. Learn. Syst. 25(3), 635–641 (2014)
Yang, J., Li, S., Sun, C., Guo, L.: Nonlinear-disturbance-observer-based robust flight control for airbreathing hypersonic vehicles. IEEE Trans. Aerosp. Electron. Syst. 49(2), 1263–1275 (2013)
Yorgancioglu, F., Komurcugil, H.: Single-input fuzzy-like moving sliding surface approach to the sliding mode control. Electr. Eng. 90(3), 199–207 (2008)
Yorgancioglu, F., Komurcugil, H.: Decoupled sliding-mode controller based on time-varying sliding surfaces for fourth-order systems. Expert Syst. Appl. 37, 6764–6774 (2010)
Yang, C., Zhai, L., Ge, S.S., Chai, T., Lee, T.H.: Adaptive model reference control of a class of MIMO discrete-time systems with compensation of nonparametric uncertainty, American Control Conference, 4111–4116 (2008)
Li, Z., Yang, C., Ding, N., Bogdan, S., Ge, T.: Robust adaptive motion control for underwater remotely operated vehicles with velocity constraints, Int. J. Control Autom. Syst. 10 (2), 421–429 (2012)
Acknowledgments
This work was supported by the National Science Foundation of China (Grants Nos.: 61304098, 61134004, 61473120), Natural Science Basic Research Plan in Shaanxi Province (Grant No.: 2014JQ8326) and State Key Laboratory of Robotics and System (HIT) grant SKLRS-2014-MS-05.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Xu, B., Shi, Z. & Yang, C. Composite fuzzy control of a class of uncertain nonlinear systems with disturbance observer. Nonlinear Dyn 80, 341–351 (2015). https://doi.org/10.1007/s11071-014-1872-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1872-5