
Abstract
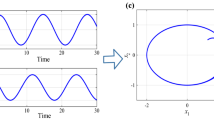
The design of robust limit-cycle controllers is introduced for autonomous systems with separable SISO nonlinearities. The objective is to design a controller to secure specified robust oscillation amplitude and frequency. The method consists of quasi-linearization of the nonlinear element via a Describing Function (DF) approach and then shaping the loop to reach desired limit-cycle characteristics. As the DF method is used, loop shaping takes place in the Nyquist plot. An example is given to illustrate the robustness of the controlled system to uncertainties in the linear subsystem model.
Similar content being viewed by others

References
Biannic, J.M.: An LFT framework for limit-cycle analysis—application to PIO detection. In: Proc. AIAA Guidance, Navigation, and Control Conference and Exhibit, Paper AIAA-2000-4367, Denver, CO (2000)
Cook, P.: Nonlinear Dynamical Systems. Prentice-Hall, Englewood Cliffs (1986)
Fadali, M.S., Cai, G., Ghoneim, Y.A.: Air/fuel ratio controller design using the describing function approach. In: Proc. American Control Conference, Baltimore, MD, vol. 3, pp. 3117–3121 (1994)
Fadali, M.S., Chachavalvoong, N.: Describing function analysis of uncertain nonlinear systems using the Kharitonov approach. In: Proc. American Control Conference, Seattle, WA, vol. 4, pp. 2908–2912 (1995)
Fendrich, O.R.: Describing functions and limit cycles. IEEE Trans. Autom. Control 37(4), 486–487 (1992)
Gelb, A., Velde, W.E.V.: Multiple-Input Describing Functions and Nonlinear System Design. McGraw-Hill, New York (1968)
Impram, S.T., Munro, N.: Describing function analysis of nonlinear systems with parametric uncertainties. In: Proc. UKACC International Conference on Control’98, Swansea, UK, vol. 1, pp. 112–116 (1998)
Khalil, H.K.: Nonlinear Systems. Macmillan, New York (1992)
Mees, A.I.: Dynamic of Feedback Systems. Wiley, New York (1981)
Oliveira, N.M.F., Kienitz, K.H.: Attitude controller design for a system using actuators with switching-time restrictions and delays. In: Proc. AIAA Guidance, Navigation, and Control Conference, Paper AIAA-2000-3967, Denver, CO (2000)
Tierno, J.E.: Describing function analysis in the presence of uncertainty. J. Guid. Control Dyn. 20(5), 956–961 (1997)
Skogestad, S., Postlethwaite, I.: Multivariable Feedback Control: Analysis and Design. Wiley, New York (1996)
Zhou, K., Doyle, J.C.: Essentials of Robust Control. Prentice-Hall, Englewood Cliffs (1998)
Slotine, J.E., Li, W.: Applied Nonlinear Control. Prentice Hall, Englewood Cliffs (1991)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Oliveira, N.M.F., Kienitz, K.H. & Misawa, E.A. A describing function approach to the design of robust limit-cycle controllers. Nonlinear Dyn 67, 357–363 (2012). https://doi.org/10.1007/s11071-011-9983-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-011-9983-8