
Abstract
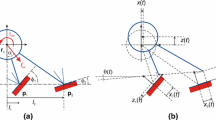
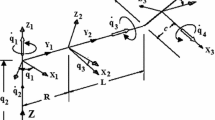
The hopping or bouncing motion can be observed when robotic manipulators are sliding on a rough surface. Making clear the reason of generating such phenomenon is important for the control and dynamical analysis for mechanical systems. In particular, such phenomenon may be related to the problem of Painlevé paradox. By using LCP theory, a general criterion for identifying the bouncing motion appearing in a planar multibody system subject to single unilateral constraint is established, and found its application to a two-link robotic manipulator that comes in contact with a rough constantly moving belt. The admissible set in state space that can assure the manipulator keeping contact with the rough surface is investigated, and found which is influenced by the value of the friction coefficient and the configuration of the system. Painlevé paradox can cause either multiple solutions or non-existence of solutions in calculating contact force. Developing some methods to fill in the flaw is also important for perfecting the theory of rigid-body dynamics. The properties of the tangential impact relating to the inconsistent case of Painlevé paradox have been discovered in this paper, and a jump rule for determining the post-states after the tangential impact finishes is developed. Finally, the comprehensively numerical simulation for the two-link robotic manipulator is carried out, and its dynamical behaviors such as stick-slip, the bouncing motion due to the tangential impact at contact point or the external forces, are exhibited.
Similar content being viewed by others

References
Painlevé, P.: Sur les lois du frottement de glissement. Comptes Rendu Séances ĺAcad. Sci. 121, 112–115 (1895)
Klein, F.: Zu Painleves kritik der coulombschen reibungsgesetze. Z. Math. Phys. 58, 186–191 (1909)
Delassus, E.: Considérations sur le frottement de glissement. Nouv. Ann. Math. (4èmé série) 20, 485–496 (1920)
Delassus, E.: Sur les lois du frottement de glissement. Bull. Soc. Math. France 51, 22–33 (1923)
Lötstedt, P.: Coulomb friction in two-dimensional rigid-body systems. Z. Angew. Math. Mech. 61, 605–615 (1981)
Lötstedt, P.: Mechanical systems of rigid bodies subject to unilateral constraints. ASME J. Appl. Math. 42, 281–296 (1982)
Erdmann, M.: On a representation of friction in conguration space. Int. J. Robotics Res. 13(3), 240–271 (1994)
Moreau, J.J.: Unilateral Contact and Dry Friction in Finite Freedom Dynamics. Nonsmooth Mechanics and Applications, pp. 1–82. Springer, Berlin Heidelberg New York (1988)
Wang, Y., Mason, M.T.: Two-dimensional rigid-body collisions with friction. J. Appl. Mech. 59, 635–642 (1992)
Baraff, D.: Coping with friction for non-penetrating rigid body simulation. Comput. Graph. 25(4), 31–40 (1991)
Glocker, C., Pheiffer, F.: Multibody Dynamics with Unilateral Contacts. Wiley, New York (1996)
Payr, M., Glocker, C.: Oblique frictional impact of a bar: analysis and comparison of different impact laws. Nonlinear Dyn. 41, 361–383 (2005)
Brogliato, B.: Nonsmooth Mechanics, 2nd edn. Springer, Berlin Heidelberg New York (1999)
Leine, R.I., Brogliato, B., Nijmeijer, H.: Periodic motion and bifurcations induced by the Painlevé paradox. Eur. J. Mech. A Solids 21, 869–896 (2002)
Génot, F., Brogliato, B.: New results on Painlevé paradoxes. Eur. J. Mech. A Solids 18, 653–677 (1999)
Ivanov, A.P.: The problem of constrainted Impact. J. Appl. Math. Mech. 61(3), 341–253 (1997)
Ivanov, A.P.: Singularities in the dynamics of systems with non-ideal constraints. J. Appl. Math. Mech. 67(2), 185–192 (2003)
Brach, R.M.: Impact coefficients and tangential impacts. ASME J. Appl. Mech. 64, 1014–1016 (1997)
Zhen, Z., Bin, C., Liu, C., Hai, J.: Impact model resolution on Painlev's paradox. ACTA Mech. Sin. 20(6), 659–660 (2004)
Zhen, Z., Liu, C., Bin, C.: The numerical method for three-dimensional impact with friction of multi-rigid-body system. Sci. China Ser. G Phys. Astr. 49(1), 102–118 (2006)
Peng, S., Kraus, P., Kumar, V., Dupont, P.: Analysis of rigid-body dynamic models for simulation of systems with frictional contacts. J. Appl. Mech. 68, 118–128 (2001)
Grigoryan, S.S.: The solution to the Painlevé paradox for dry friction. Doklady Phys. 46(7), 499–503 (2001)
Stewart, D.E.: Rigid-body dynamics with friction and impact. SIAM Rev. 42(1), 3–39 (2000)
Stewart, D.E.: Convergence of a time-stepping scheme for rigid-body dynamics and resolution of Painlevé’s problem. Arch. Rational Mech. Anal. 145, 215–260 (1998)
Wilms, E.V., Cohen, H.: The occurence of Painlevé’s paradox in the motion of a rotating shaft. J. Appl. Mech. 64 (1997)
Ibrahim, R.A.: Friction-induced vibration, chatter, squeal and chaos. Part II: Dynamics and modeling. ASME Appl. Mech. Rev. 47(7), 227–253 (1994)
Brogliato, B.: Some perspectives on the analysis and control of complementarity systems. IEEE Trans. Autom. control 48(6), 918–935 (2003)
Schiehlen, W., Seiferied, R.: Three approaches for elastodynamic contact in multibody systems. Multibody Syst. Dyn. 12, 1–16 (2004)
Hu, B., Eberhard, P., Schiehlen, W.: Comparison of analytical and experimental results for longitudinal impacts on elastic rods. J. Vib. Control 9, 157–174 (2003)
Keller, J.B.: Impact with friction. Trans. ASME J. Appl. Mech. 53, 1–4 (1986)
Stronge, W.J.: Impact Mechanics. Cambridge University Press, Cambridge, UK (2000)
Bhatt, V., Koechling, J.: Partitioning the parameter space according to different behaviors during three-dimensional. ASME J. Appl. Mech. 62, 740–746 (1995)
Batlle, J.A.: Rough balanced collisions. ASME J. Appl. Mech. 63, 168–172 (1996)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Liu, C., Zhao, Z. & Chen, B. The bouncing motion appearing in a robotic system with unilateral constraint. Nonlinear Dyn 49, 217–232 (2007). https://doi.org/10.1007/s11071-006-9123-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-006-9123-z