
Abstract
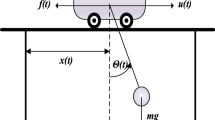
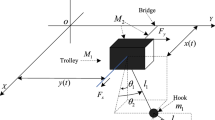
This paper describes an efficient method called Riccati discrete time transfer matrix method of multibody system (MS-RDTTMM) for studying the dynamic modeling and anti-swing control design of a two-dimensional overhead crane system, which consists of a trolley, rope, load, and control subsystem. Regarding the rope as a series of rigid segments connected by hinges, a multibody model of the overhead crane system can be developed easily by using MS-RDTTMM. Then three separate fuzzy logic controllers are designed for positioning and anti-swing control. For improving the performance of the predesigned fuzzy control system, the genetic algorithm based on MS-RDTTMM is presented offline to tune the initial control parameters. Using the recursive transfer formula to describe the system dynamics, instead of the global dynamics equation in ordinary dynamics methods, the matrices involved in this method are always very small, and the computational cost of the dynamic analysis and control system optimization can be greatly reduced. The numerical verification is carried out to show the computational efficiency, numerical stability, and control performance of the proposed method.









Similar content being viewed by others
References
Chang, C.Y.: Adaptive fuzzy controller of the overhead cranes with nonlinear disturbance. IEEE Trans. Ind. Inform. 3(2), 164–172 (2007)
Chang, C.Y., Chiang, K.H.: Fuzzy projection control law and its application to the overhead crane. Mechatronics 18, 607–615 (2008)
Matsuo, T., Yoshino, R., Suemitsu, H., et al.: Nominal performance recovery by PID+Q controller and its application to antisway control of crane lifter with visual feedback. IEEE Trans. Control Syst. Technol. 12(1), 156–166 (2004)
Park, M.S., Chwa, D., Hong, S.K.: Antisway tracking control of overhead cranes with system uncertainty and actuator nonlinearity using an adaptive fuzzy sliding-mode control. IEEE Trans. Ind. Electron. 55(11), 3972–3984 (2008)
Lee, H.H., Cho, S.K.: A new fuzzy-logic anti-swing control for industrial three-dimensional overhead cranes. In: Proceedings of IEEE International Conference on Robotics & Automation, pp. 2956–2961 (2001)
Karkoub, M.A., Zribi, M.: Modeling and energy based nonlinear control of crane lifters. IEE Proc., Control Theory Appl. 149(3), 209–215 (2002)
Fang, Y., Dixon, W.E., Dawson, D.M., Zergeroglu, E.: Nonlinear coupling control laws for an underactuated overhead crane systems. IEEE/ASME Trans. Mechatron. 8(3), 418–423 (2003)
Liu, D.T., Yi, J.Q., Zhao, D.B.: Adaptive sliding mode fuzzy control for a two-dimensional overhead crane. Mechatronics 15, 505–522 (2005)
Yu, W., Moreno-Armendariz, M.A., Rodriguez, F.O.: Stable adaptive compensation with fuzzy CMAC for an overhead crane. Inf. Sci. 181(21), 4895–4907 (2011)
Tuan, L.A., Moon, S.C., Lee, W.G., et al.: Adaptive sliding mode control of overhead cranes with varying cable length. J. Mech. Sci. Technol. 27(3), 885–893 (2013)
Pezeshki, S., Badamchizadeh, M.A., Ghiasi, A.R., et al.: Control of overhead crane system using adaptive model-free and adaptive fuzzy sliding mode controllers. J. Control Autom. Electr. Syst. 26(1), 1–15 (2015)
Zhang, Z.C., Wu, Y.Q., Huang, J.M.: Differential-flatness-based finite-time anti-swing control of underactuated crane systems. Nonlinear Dyn. 87(3), 1749–1761 (2017)
Schiehlen, W.: Research trends in multibody system dynamics. Multibody Syst. Dyn. 18(1), 3–13 (2007)
Wasfy, T.M., Noor, A.K.: Computational strategies for flexible multibody system. Appl. Mech. Rev. 56(6), 553–613 (2003)
Shabana, A.A.: Dynamics of Multibody Systems. Cambridge University Press, New York (2005)
Ambrósio, J.A.C., Gonçalves, J.P.C.: Complex flexible multibody systems with application to vehicle dynamics. Multibody Syst. Dyn. 10(6), 168–182 (2001)
Wittenburg, J.: Dynamics of Multibody Systems. Springer, Berlin (2008)
Pestel, E.C., Leckie, F.A.: Matrix Method in Elastomechanics. McGraw-Hill, New York (1963)
Rui, X.T., He, B., Lu, Y.Q., et al.: Discrete time transfer matrix method for multibody system dynamics. Multibody Syst. Dyn. 14(3–4), 317–344 (2005)
Rong, B., Rui, X.T., Tao, L.: Dynamics and genetic fuzzy neural network vibration control design of a smart flexible four-bar linkage mechanism. Multibody Syst. Dyn. 28(4), 291–311 (2012)
He, B., Rui, X.T., Wang, G.P.: Riccati discrete time transfer matrix method for elastic beam undergoing large overall motion. Multibody Syst. Dyn. 18(4), 579–598 (2007)
Wang, G.P., Rong, B., Tao, L., et al.: Riccati discrete time transfer matrix method for dynamic modeling and simulation of an underwater towed system. J. Appl. Mech. 79, 041014 (2012)
Rong, B.: Efficient dynamics analysis of large-deformation flexible beams by using the absolute nodal coordinate transfer matrix method. Multibody Syst. Dyn. 32(4), 535–549 (2014)
Kamman, J.W., Huston, R.L.: Multibody dynamics modeling of variable length cable systems. Multibody Syst. Dyn. 5, 211–221 (2001)
Williams, P., Trivailo, P.: A study on the transitional dynamics of a towed-circular aerial cable system. In: AIAA Atmospheric Flight Mechanics Conference and Exhibit, 15–18 August 2005, San Francisco, California (2005)
Quisenberry, J.E., Arena, A.S.: Discrete cable modeling and dynamic analysis. In: 44th AIAA Aerospace Sciences Meeting and Exhibit, 9–12 January 2006, Reno, Nevada (2006)
Dokainish, M.A., Subbaraj, K.: A study of direct time-integration methods in computational structural dynamics-I. Explicit methods. Comput. Struct. 32(6), 1371–1386 (1989)
Zhou, Y.: Research and simulation on anti-swing of container crane using fuzzy intelligent control. Master’s Thesis, Wuhan University of Technology (2003)
Wang, Y.Y.: Research on fuzzy logic anti-swing control of overhead crane. Master’s Thesis, Dalian University of Technology (2008)
Murata, T., Ishibuchi, H., Tanaka, H.: Multi-objective genetic algorithm and its applications to flowshop scheduling. Comput. Ind. Eng. 30(4), 957–968 (1996)
Li, Y., Liu, J.C., Wang, Y.: An improved adaptive weight approach GA for optimizing multi-objective rolling schedules in a tandem cold rolling. Control Theory Appl. 26(6), 687–693 (2009)
Poursamad, A., Montazeri, M.: Design of genetic-fuzzy control strategy for parallel hybrid electric vehicles. Control Eng. Pract. 16, 861–873 (2008)
Horner, G.C.: The Riccati transfer matrix method. Ph.D. dissertation, University of Virginia, USA (1975)
Acknowledgements
The research was supported by the Natural Science Foundation of China (Grant Nos. 11702292, 11605234).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Rong, B., Rui, X., Tao, L. et al. Dynamics analysis and fuzzy anti-swing control design of overhead crane system based on Riccati discrete time transfer matrix method. Multibody Syst Dyn 43, 279–295 (2018). https://doi.org/10.1007/s11044-017-9598-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-017-9598-z