
Abstract
This work proposes an analytic method for resolving planar multi-point indeterminate impact problems for rigid-body systems. An event-based approach is used to detect impact events, and constraints consistent with the rigid-body assumption are used to resolve the indeterminacy associated with multi-point impact analysis. The work-energy relation is utilized to determine post-impact velocities based on an energetic coefficient of restitution to model energy dissipation, thereby yielding an energetically consistent set of post-impact velocities based on Stronge’s energetic coefficient of restitution for the treatment of rigid impacts. The effect of stick–slip transition is analyzed based on Coulomb friction. This paper also discusses the transition from impact to contact. This analysis is essential for considering the rocking block problem that is used as an example herein. The predictions of the model for the rocking block problem are compared to experimental results published in the literature. An example of a planar ball undergoing two-point impact is also presented.















Similar content being viewed by others
References
Djerassi, S.: Collision with friction; Part B: Poisson’s and Stronge’s hypotheses. Multibody Syst. Dyn. 21(1), 55–70 (2009)
Song, P., Krauss, P., Dupont, P.: Analysis of rigid-body dynamic models for simulation of systems with frictional contacts. J. Appl. Mech. 68(1), 118–128 (2000)
Gonthier, Y., McPhee, J., Lange, C., Piedboeuf, J.-C.: A regularized contact model with asymmetric damping and dwell-time dependent friction. Multibody Syst. Dyn. 11(3), 209–233 (2004)
Sharf, I., Zhang, Y.: A contact force solution for non-colliding contact dynamics simulation. Multibody Syst. Dyn. 16(3), 263–290 (2006)
Anitescu, M., Potra, F.: Formulating dynamic multi-rigid-body contact problems with friction as solvable linear complementarity problems. Nonlinear Dyn. 14(3), 231–247 (1997)
Chatterjee, A.: On the realism of complementarity conditions in rigid body collisions. Nonlinear Dyn. 20(2), 159–168 (1999)
Lankarani, H.: Contact force model with hysteresis damping for impact analysis of multibody systems. J. Mech. Des. 112(3), 369–376 (1990)
Gilardi, G., Sharf, I.: Literature survey of contact dynamics modeling. Mech. Mach. Theory 37(10), 1213–1239 (2002)
Brogliato, B.: Nonsmooth Mechanics: Models, Dynamics and Control, 2nd edn. Springer, London (1999)
Leine, R., Van de Wouw, N.: Stability and Convergence of Mechanical Systems with Unilateral Constraints, vol. 36. Springer, Berlin (2007)
Keller, J.: Impact with friction. J. Appl. Mech. 53(1), 1–4 (1986)
Stronge, W.: Smooth dynamics of oblique impact with friction. Int. J. Impact Eng. 51, 36–49 (2013)
Bergés, P., Bowling, A.: Rebound, slip, and compliance in the modeling and analysis of discrete impacts in legged locomotion. J. Vib. Control 17(12), 1407–1430 (2006)
Djerassi, S.: Stronge’s hypothesis-based solution to the planar collision-with-friction problem. Multibody Syst. Dyn. 24(4), 493–515 (2010)
Rodriguez, A., Bowling, A.: Solution to indeterminate multi-point impact with frictional contact using constraints. Multibody Syst. Dyn. 28(4), 313–330 (2012)
Wang, Y., Kumar, V., Abel, J.: Dynamics of rigid bodies undergoing multiple frictional contacts. In: Proc-IEEE Int’l Conference on Robotics and Automation, vol. 3, pp. 2764–2769 (1992)
Liu, C., Zhao, Z., Brogliato, B.: Frictionless multiple impacts in multibody systems. I. Theoretical framework. Proc. R. Soc. A, Math. Phys. Eng. Sci. 464(2100), 3193–3211 (2008)
Zhao, Z., Liu, C., Brogliato, B.: Planar dynamics of a rigid body system with frictional impacts. II. Qualitative analysis and numerical simulations. Proc. R. Soc. A, Math. Phys. Eng. Sci. 465(2107), 2267–2292 (2009)
Brake, M.: An analytical elastic-perfectly plastic contact model. Int. J. Solids Struct. 49(22), 3129–3141 (2012)
Jackson, R.L., Green, I., Marghitu, D.B.: Predicting the coefficient of restitution of impacting elastic-perfectly plastic spheres. Nonlinear Dyn. 60(3), 217–229 (2010)
Zait, Y., Zolotarevsky, V., Kligerman, Y., Etsion, I.: Multiple normal loading-unloading cycles of a spherical contact under stick contact condition. J. Tribol. 132(4), 041401 (2010)
Kane, T., Levinson, D.: Dynamics: Theory and Applications. McGraw-Hill, New York (1985)
Marghitu, D., Stoenescu, E.: Rigid body impact with moment of rolling friction. Nonlinear Dyn. 50(3), 597–608 (2007)
Boulanger, G.: Sur le choc avec frottement des corps non parfaitement élastiques. Rev. Sci. 77, 325–327 (1939)
Routh, E.J., et al.: Dynamics of a System of Rigid Bodies. Dover, New York (1960)
Stronge, W.: Impact Mechanics. Cambridge University Press, Cambridge (2000)
Najafabadi, S., Kovecses, J., Angeles, J.: Generalization of the energetic coefficient of restitution for contacts in multibody systems. J. Comput. Nonlinear Dyn. 3(4), 70–84 (2008)
Yilmaz, C., Gharib, M., Hurmuzlu, Y.: Solving frictionless rocking block problem with multiple impacts. Proc. R. Soc. A, Math. Phys. Eng. Sci. 465(2111), 3323–3339 (2009)
Zhao, Z., Liu, C., Brogliato, B.: Planar dynamics of a rigid body system with frictional impacts. II. Qualitative analysis and numerical simulations. Proc. R. Soc. Lond. Ser. A, Math. Phys. Eng. Sci. 465(2107), 2267–2292 (2009)
Jackson, R., Green, I., Marghitu, D.: Predicting the coefficient of restitution of impacting elastic-perfectly plastic spheres. Nonlinear Dyn. 60(3), 217–229 (2010)
Brach, R.: Formulation of rigid body impact problems using generalized coefficients. Int. J. Eng. Sci. 36(1), 61–71 (1998)
Rodriguez, A., Bowling, A.: Study of Newton’s cradle using a new discrete approach. Multibody Syst. Dyn. 33(1), 61–92 (2015)
Brogliato, B., Ten Dam, A., et al.: Numerical simulation of finite dimensional multibody nonsmooth mechanical systems. Appl. Mech. Rev. 55(2), 107–149 (2002)
Glocker, C., Studer, C.: Formulation and preparation for numerical evaluation of linear complementarity systems in dynamics. Multibody Syst. Dyn. 13(4), 447–463 (2005)
Mouri, T., Yamada, T., Iwai, A., Mimura, N., Funahashi, Y.: Identification of contact conditions from contaminated data of contact force and moment. In: Proceedings IEEE International Conference on Robotics and Automation, vol. 1, pp. 597–603 (2001)
Bowling, A.: Dynamic performance, mobility, and agility of multi-legged robots. J. Dyn. Syst. Meas. Control 128(4), 765–777 (2006)
Karnopp, D.: Computer simulation of stick–slip friction in mechanical dynamic systems. J. Dyn. Syst. Meas. Control 107(1), 100–103 (1985)
Haessig, D., Friedland, B.: On the modeling and simulation of friction. Am. Control 113(3), 354–362 (1991)
Han, I., Gilmore, B.: Multi-body impact motion with friction-analysis, simulation, and experimental validation. J. Mech. Des. 115(3), 412–422 (1993)
Zhang, F., Yeddanapudi, M., Mosterman, P.J.: Zero-crossing location and detection algorithms for hybrid system simulation. IFAC Proc. Vol. 41(2), 7967–7972 (2008)
Mosterman, P.J.: An overview of hybrid simulation phenomena and their support by simulation packages. In: International Workshop on Hybrid Systems: Computation and Control, pp. 165–177. Springer, Berlin (1999)
Utkin, V.: Chattering problem. IFAC Proc. Vol. 44(1), 13374–13379 (2011)
Aljarbouh, A., Caillaud, B.: Chattering-free simulation of hybrid dynamical systems with the functional mock-up interface 2.0. In: The First Japanese Modelica Conferences, vol. 124(013), pp. 95–105 (2016)
Pennestrı, V.P., Valentini, P.: Coordinate reduction strategies in multibody dynamics: a review. In: Proceedings of the Conference on Multibody System Dynamics (2007)
Bauchau, O.A., Laulusa, A.: Review of contemporary approaches for constraint enforcement in multibody systems. J. Comput. Nonlinear Dyn. 3(1), 011005 (2008)
Baumgarte, J.: Stabilization of constraints and integrals of motion in dynamical systems. Comput. Methods Appl. Mech. Eng. 1(1), 1–16 (1972)
Ostermeyer, G.-P.: On Baumgarte stabilization for differential algebraic equations. In: Real-Time Integration Methods for Mechanical System Simulation, pp. 193–207. Springer, Berlin (1990)
Nikravesh, C., Nikravesh, P.: An adaptive constraint violation stabilization method for dynamic analysis of mechanical systems. J. Mech. Transm. Autom. Des. 107, 488–492 (1985)
Park, K., Chiou, J.: Stabilization of computational procedures for constrained dynamical systems. J. Guid. Control Dyn. 11(4), 365–370 (1988)
Bayo, E., De Jalon, J.G., Serna, M.A.: A modified Lagrangian formulation for the dynamic analysis of constrained mechanical systems. Comput. Methods Appl. Mech. Eng. 71(2), 183–195 (1988)
Wehage, R., Haug, E.: Generalized coordinate partitioning for dimension reduction in analysis of constrained dynamic systems. J. Mech. Des. 104(1), 247–255 (1982)
García de Jalón, J., Unda, J., Avello, A., Jiménez, J.: Dynamic analysis of three-dimensional mechanisms in “natural” coordinates. J. Mech. Transm. Autom. Des. 109(4), 460–465 (1987)
Liang, C., Lance, G.M.: A differentiable null space method for constrained dynamic analysis. J. Mech. Transm. Autom. Des. 109(3), 405–411 (1987)
Kim, S., Vanderploeg, M.: Qr decomposition for state space representation of constrained mechanical dynamic systems. J. Mech. Trans 108(2), 183–188 (1986)
Amirouche, F., Ider, S.: Coordinate reduction in the dynamics of constrained multibody systems-a new approach. J. Appl. Mech. 55, 899 (1988)
Righetti, L., Buchli, J., Mistry, M., Schaal, S.: Inverse dynamics control of floating-base robots with external constraints: a unified view. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 1085–1090. IEEE Press, New York (2011)
Mistry, M., Buchli, J., Schaal, S.: Inverse dynamics control of floating base systems using orthogonal decomposition. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 3406–3412. IEEE Press, New York (2010)
Shampine, L.F., Reichelt, M.W.: The Matlab ODE suite. SIAM J. Sci. Comput. 18(1), 1–22 (1997)
Dormand, J., Prince, P.: A family of embedded Runge–Kutta formulae. J. Comput. Appl. Math. 6(1), 19–26 (1980)
Flores, P., Leine, R., Glocker, C.: Modeling and analysis of planar rigid multibody systems with translational clearance joints based on the non-smooth dynamics approach. Multibody Syst. Dyn. 23(2), 165–190 (2010)
Choi, J., Ryu, H., Kim, C., Choi, J.: An efficient and robust contact algorithm for a compliant contact force model between bodies of complex geometry. Multibody Syst. Dyn. 23(1), 99–120 (2010)
Lopes, D., Silva, M., Ambrosio, J., Flores, P.: A mathematical framework for contact detection between quadric and superquadric surfaces. Multibody Syst. Dyn. 24(3), 255–280 (2010)
Zhang, H., Brogliato, B., Liu, C.: Dynamics of planar rocking-blocks with Coulomb friction and unilateral constraints: comparisons between experimental and numerical data. Multibody Syst. Dyn. 32(1), 1–25 (2014)
Brogliato, B., Zhang, H., Liu, C.: Analysis of a generalized kinematic impact law for multibody-multicontact systems, with application to the planar rocking block and chains of balls. Multibody Syst. Dyn. 27(3), 351–382 (2012)
Hurmuzlu, Y., Génot, F., Brogliato, B.: Modeling, stability and control of biped robots—a general framework. Automatica 40(10), 1647–1664 (2004)
Grizzle, J.W., Chevallereau, C., Sinnet, R.W., Ames, A.D.: Models, feedback control, and open problems of 3d bipedal robotic walking. Automatica 50(8), 1955–1988 (2014)
Housner, G.W.: The behavior of inverted pendulum structures during earthquakes. Bull. Seismol. Soc. Am. 53(2), 403–417 (1963)
Yim, C.-S., Chopra, A.K., Penzien, J.: Rocking response of rigid blocks to earthquakes. Earthq. Eng. Struct. Dyn. 8(6), 565–587 (1980)
Liu, T.: Non-jamming conditions in multi-contact rigid-body dynamics. Multibody Syst. Dyn. 22(3), 269–295 (2009)
Zhao, Z., Liu, C., Brogliato, B.: Energy dissipation and dispersion effects in granular media. Phys. Rev. E 78(3), 031307 (2008)
Liu, C., Zhao, Z., Brogliato, B.: Variable structure dynamics in a bouncing dimer. Ph.D. Dissertation, INRIA (2008)
Liu, C., Zhao, Z., Brogliato, B.: Frictionless multiple impacts in multibody systems. II. numerical algorithm and simulation results. Proc. R. Soc. Lond. Ser. A, Math. Phys. Eng. Sci. 465(2101), 1–23 (2009)
Peña, F., Prieto, F., Lourenço, P.B., Campos Costa, A., Lemos, J.V.: On the dynamics of rocking motion of single rigid-block structures. Earthq. Eng. Struct. Dyn. 36(15), 2383–2399 (2007)
Peña, F., Lourenço, P.B., Campos-Costa, A.: Experimental dynamic behavior of free-standing multi-block structures under seismic loadings. J. Earthq. Eng. 12(6), 953–979 (2008)
Giouvanidis, A., Dimitrakopoulos, I.: Modelling contact in rocking structures with a nonsmooth dynamics approach. In: ECCOMAS Congress 2016—Proceedings of the 7th European Congress on Computational Methods in Applied Sciences and Engineering (2016)
Zhang, H., Brogliato, B.: The planar rocking-block: analysis of kinematic restitution laws, and a new rigid-body impact model with friction. Ph.D. Dissertation, INRIA (2011)
Bedford, A., Fowler, W.: Engineering Mechanics: Dynamics. Pearson Education, Upper Saddle River (2008)
Craig, J.: Introduction to Robotics: Mechanics and Control. Addison-Wesley, Reading (1989)
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Energy plots
The energy plots are included here to show energy consistency for the collisions simulated for the planar rocking block (frictionless and frictional) and planar ball examples. The drops in total energy shown in Figs. 16, 17, and 18 correspond to the energy losses specified by the global ECOR and friction analyzed in the previous sections.

Energy consistency throughout the simulation for (a) frictionless rocking block, and (b) frictional rocking block examples (Color figure online)

Energy consistency throughout the simulation for the planar ball example (Color figure online)

Energy consistency throughout the simulation for (a) Specimen 1, (b) Specimen 2, (c) Specimen 4 (Color figure online)
Appendix B: Velocity projection method
Consider for example two impact points, 1 and 2, located on a rigid body. Using classical rigid-body dynamics [77], the difference between the velocities of these two impact points is found as
where \({\boldsymbol{\omega }}\) is the angular velocity of the body and \(\mathbf{P}_{Oi}\) is the position vector of impact point \(i\) with respect to the body’s mass center. If the dot product of the unit direction between impact points 1 and 2 is applied to each side of Eq. (54), such that the right-hand side is zero, then the rigid-body assumption defines
Additional rigid-body constraints can be formulated using this method with the consideration of more impact points. The benefit is clear from the simple nature of Eq. (55) and permits the definition of a kinematic relationship among a collection of impact points on a rigid body.
2.1 B.1 Rocking block
Evaluating the terms involved in the constraint for the planar rocking block yields
The velocity constraint obtained in Eq. (56) is used to constrain one of the tangential velocities. Consider an example where \(v_{t1}\) is constrained. This is accomplished by solving for this velocity term and substituting the expression into Eq. (58) which gives,
where \(P\) is a matrix of full rank containing the velocity constraint and \({\boldsymbol{\vartheta }}^{*}\) contains the constrained velocity space. The dual property of the impact Jacobian defines a relationship between velocities and forces, which is derived based on the principle of virtual work and conservation of energy theory [78],
such that
Equation (59) yields
where \(P^{+}\) is the left-inverse of \(P\). It is incorrect to assume that the constrained force space \(\mathbf{F}^{*}\) will involve the same terms as in the constrained velocity space \({\boldsymbol{\vartheta }}^{*}\). Therefore, consider the second expression in Eq. (60) where \(\mathbf{F}^{*}\) is solved:
such that
The first and third relations yield the same force constraint,
Applying a definite integration of Eq. (63), the constraint is expressed in terms of impulses as
Note that for a frictionless case (\(\mu_{i} = 0\)) the tangential forces vanish, which eliminates the indeterminacy in the system equations of motion.
2.2 B.2 Planar ball
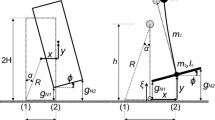
Evaluating the terms involved in the constraint for the planar ball shown in Fig. 1(b) yields
The velocity constraint obtained in Eq. (65) is used to constrain one of the tangential velocities. Consider an example where \(v_{t1}\) is constrained. This is accomplished by solving for this velocity term in Eq. (65) which gives
where \(P\) is a matrix of full rank containing the velocity constraint and \({\boldsymbol{\vartheta }}^{*}\) contains the constrained velocity space. Applying the dual property of the impact Jacobian and solving for the constrained force space yields
Using this result in the first relation in Eq. (60) gives
such that every relation in Eq. (68) yields the same force constraint:
Applying a definite integration of Eq. (69), the constraint is expressed in terms of impulses as
Note again that for a frictionless case (\(\mu_{i} = 0\)) the tangential forces vanish, which eliminates the indeterminacy in the system equations of motion.
Rights and permissions
About this article

Cite this article
Chatterjee, A., Rodriguez, A. & Bowling, A. Analytic solution for planar indeterminate impact problems using an energy constraint. Multibody Syst Dyn 42, 347–379 (2018). https://doi.org/10.1007/s11044-017-9590-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-017-9590-7