
Abstract
Computational models for tethers, chains, and ropes are prevalent in mechanical and aerospace systems. Many different model structures, spanning multiple applications, appear in the literature; however, little work exists to show how these different models compare with respect to accuracy, computational expense, and numerical reliability. In this work three discrete tether models, a recursive multi-body model, a Kelvin–Voigt visco-elastic model, and a Standard Linear visco-elastic model, are all compared. Comparisons of each model are made with experimental data collected for tethers of varying material, physical properties, and loading conditions resulting in substantial nonlinear effects. Results show that each model, depending in the application and expected loading, has advantages and disadvantages in regard to computational burden, accuracy, and numerical stability. Guidelines based on the results provide suggestions to which tether models may be most appropriate for a variety of applications.

























Similar content being viewed by others

Abbreviations
- \(\mathbf{a}_{j}\) :
-
acceleration of \(j\)th concentrated mass, \(m_{j}\), with respect to the inertial frame
- \(\mathbf{a}_{j}^{{c}}\) :
-
acceleration of \(j\)th connection joint with respect to the inertial frame
- \(\mathbf{a}_{j}^{{m}}\) :
-
acceleration of mass center of \(j\)th link with respect to the inertial frame
- \(A, B\) :
-
tether cases based on physical and material properties
- \(\mathit{An}\), \(\mathit{Bn}\) :
-
tether sub-cases (\(n = 1\) to 3)
- \(b_{j}\) :
-
\(j\)th link of the tether (ground link \(j = 0\), root link \(j = 1\), terminal link \(j = N\))
- \(c_{j}\) :
-
\(j\)th connection joint (ground connection joint \(j = 0\))
- \(C_{D}\) :
-
drag coefficient
- \(C_{R}\) :
-
tether damping coefficient
- \(C_{\mathit{Rj}}\) :
-
damping coefficient of \(j\)th link
- \(C_{\mathit{Vj}}\) :
-
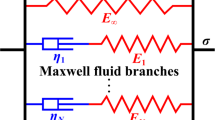
viscous damping coefficient for \(j\)th visco-elastic line element
- \(d\) :
-
diameter of the tether
- \(d_{R}\) :
-
diameter of reflective marker
- \(\mathbf{E}_{{n}}\) :
-
\(n \times n\) identity matrix
- \(\mathbf{F}_{\mathit{Dj}}\) :
-
drag force for \(j\)th link
- \(\mathbf{F}_{j}\) :
-
\(5 \times 1\) force matrix for \(j\)th link
- \(h\) :
-
time step used for numerical integration
- \(K_{j}\) :
-
damping parameter for \(j\)th Standard Linear element
- \(K_{\mathit{Rj}}\) :
-
rotational stiffness for \(j\)th connection
- \(K_{\mathit{Sj}}\) :
-
spring stiffness for \(j\)th visco-elastic line element
- \(K_{T}\) :
-
total static stiffness for a general tether
- \(K_{\mathit{Vj}}\) :
-
additional spring stiffness for \(j\)th Standard Linear element
- \(I\) :
-
inertial reference frame defined by a triad of unit vectors \(\mathbf{i}_{{I}}\), \(\mathbf{j}_{{I}}\), \(\mathbf{k}_{ {I}}\)
- \(I_{\mathit{nn}}\) :
-
mass moment of inertia about \(i, j, k\) body axes with \(n = x\), \(y\), \(z\), respectively
- \(I_{\mathit{nn}}^{e}\) :
-
mass moment of inertia for terminal mass attached to tether with \(n = x\), \(y\), \(z\), respectively
- \(\mathbf{I}_{{j}}\) :
-
inertia matrix of \(j\)th body
- \(\tilde{\mathbf{I}}_{j}\) :
-
\(2 \times 2\) inertia matrix consisting of \(I_{yy}\) and \(I_{zz}\)
- \(L_{j}^{el}\) :
-
unstretched length of \(j\)th visco-elastic line element
- \(\mathbf{L}_{{j}}\) :
-
moment due to viscous damping in \(j\)th connection joint acting on the \(j+1\) link and the \(j\)th link, respectively
- \(\tilde{\mathbf{L}}_{j}\) :
-
\(2 \times 1\) moment vector consisting of \({j}\) and \({k}\) components of \(\mathbf{L} _{{j}}\)
- \(L_{nj}\) :
-
\(n\)th component of \(\mathbf{L}_{{j}}\) with \(n = x, y, z\), respectively
- \(l_{j}\) :
-
length of individual \(j\)th link
- \(l_{T}\) :
-
overall tether length
- \(M_{j}\) :
-
damping parameter for \(j\)th Standard Linear element
- \(m_{e}\) :
-
mass attached to terminal end of a tether
- \(m_{j}\) :
-
mass of link \(j\)
- \(m_{R}\) :
-
mass of reflective marker
- \(m_{T}\) :
-
total mass of the tether
- \(N\) :
-
total number of tether links
- \(\mathbf{P}_{{j}}\) :
-
moment due to bending stiffness in \(j\)th connection joint acting on links \(j+1\) and \(j\), respectively
- \(p_{j}, q_{j}, r_{j}\) :
-
angular velocity components of \(j\)th link
- \(q_{0 j}, q_{1j}, q_{2j}, q_{3j}\) :
-
quaternion parameters for \(j\)th link
- \(\mathbf{r}_{j}^{{m}},\mathbf{r}_{ {j}}^{{c}}\) :
-
vector from connection \(j-1\) to mass center \(j\) and connection \(j\)
- \(\mathbf{R}_{{j}}\) :
-
reaction in \(j\)th connection joint acting on links \(j+1\) and \(j\), respectively
- \(\hat{\mathbf{S}}_{j}^{{c}}\) :
-
\(2 \times3\) submatrix of skew symmetric cross-product operator for position vector for \(\mathbf{r}_{j}^{{c}}\)
- \(\hat{\mathbf{S}}_{j}^{{m}}\) :
-
\(2 \times 3\) submatrix of skew symmetric cross-product operator for position vector for \(\mathbf{r}_{j}^{{m}}\)
- \(\tilde{\mathbf{S}}_{j}^{{m}}\) :
-
\(2\times 2\) submatrix for skew symmetric cross-product operator for position vector \(\mathbf{r}_{j}^{{m}}\)
- \(s\) :
-
root of a homogeneous characteristic equation for Kelvin–Voigt and Standard Linear Solid model
- \(s_{j}\) :
-
frontal area of \(j\)th link
- \(\mathbf{T}_{{I}}^{{j}}\) :
-
transformation from inertial to \(j\)th body frame
- \(\mathbf{T}_{{j} - {1}}^{{j}}\) :
-
transformation from the frame of body \(j-1\) to the frame of body \(j\)
- \(\hat{\mathbf{T}}_{{j} - {1}}^{ {j}}\) :
-
\(2 \times 2\) submatrix of the second and third columns of the second and third rows of \(\mathbf{T}_{ {j} - {1}}^{{j}}\)
- \(\tilde{\mathbf{T}}_{{j} - {1}}^{ {j}}\) :
-
\(1\times 2\) submatrix of the second and third elements of the first row of \(\mathbf{T}_{{j} - {1}}^{{j}}\)
- \(\mathbf{V}_{{j}}\) :
-
mass center velocity of \(j\)th link
- \(\dot{\mathbf{v}}_{j}\) :
-
\(5 \times 1\) acceleration vector consisting components of \(\tilde{\boldsymbol{\alpha }}_{ j / I}\) and \(\mathbf{a}_{j - 1}^{c}\), respectively
- \(\mathbf{V}_{j}^{kv}\) :
-
velocity of \(j\)th visco-elastic line element
- \(\mathbf{W}_{{j}}\) :
-
weight of \(j\)th link
- \(x_{cj}, x_{mj}\) :
-
length from (\(j-1\))th connection to \(j\)th connection and mass center
- \(\boldsymbol{\alpha }_{{j/I}}\) :
-
angular acceleration vector of \(j\)th link with respect to the inertial frame
- \(\tilde{\boldsymbol{\alpha }}_{j/I}\) :
-
\(2\times 1\) angular acceleration vector consisting of \({j}\) and \({k}\) components of \(\boldsymbol{\alpha }_{{j}/ {I}}\)
- \(\Delta x_{j}\), \(\Delta y_{j}\), \(\Delta z_{j}\) :
-
Components formed by taking the difference in inertial positions of the \(c_{j}\) and \(c_{j-1}\) connections
- \(\Delta \dot{x}_{j}, \Delta \dot{y}_{j}, \Delta \dot{z}\) :
-
Components formed by taking the difference in inertial velocities of the \(c_{j}\) and \(c_{j-1}\) connections
- \(\boldsymbol{\omega }_{{j}/{I}}\) :
-
angular velocity vector of \(j\)th link with respect to the inertial frame
- \(\boldsymbol{\omega }_{{j}/{j} - {1}}\) :
-
relative angular velocity of link \(j\) with respect to link \(j-1\)
- \(\dot{\boldsymbol{\omega }}_{j}\) :
-
\(2 \times 1\) angular acceleration vector consisting of the \(j\) and \(k\) components of \(\dot{\boldsymbol{\omega }}_{j / j - 1}\)
- \(\tilde{\boldsymbol{\omega }}_{{j}/{I}}\) :
-
\(2 \times 1\) angular velocity vector consisting of \(j\) and \(k\) components of \(\boldsymbol{\omega }_{j/I}\)
- \(\omega_{{nj}}\) :
-
\(n\)th component of \(\boldsymbol{\omega }_{ j/j - 1}\) with \(n = x, y,z\), respectively
- \(\varphi_{j},\theta_{j},\psi_{ {j}}\) :
-
\(j\)th link Euler angles
- \(\rho_{A}\), \(\rho_{T}\) :
-
air and tether density
- \(\zeta_{j}\) :
-
viscous damping factor for \(j\)th Kelvin–Voigt line element
References
Huston, R.L.: Multi-body dynamics – modeling and analysis methods. Appl. Mech. Rev. 44(3), 109–117 (1991)
Orlandea, N.V.: From Newtonian dynamics to sparse tableaux formulation and multi-body dynamics. Proc. Inst. Mech. Eng., Proc., Part K, J. Multi-Body Dyn., 222(4), 301–314 (2008)
Nikravesh, N.V.: Newtonian-based methodologies in multi-body dynamics. Proc. Inst. Mech. Eng., Proc., Part K, J. Multi-Body Dyn. 222(4), 277–288 (2008)
Bono, C.G., Perkins, N.C.: Physical and numerical modeling of the dynamic behavior of a fly line. J. Sound Vib. 255(3), 555–577 (2002)
Bono, C.G., Perkins, N.C.: Numerical model for the dynamics of a coupled fly line/fly rod system and experimental validation. J. Sound Vib. 272(3), 773–791 (2004)
Williams, P., Tivailo, P.: Dynamics of circularly towed cable systems, part 1: optimal configurations and their stability. J. Guid. Control Dyn. 30(3), 753–765 (2007)
Kamman, J., Huston, R.: Modeling of variable length towed and tethered cable systems. J. Guid. Control Dyn. 20(4), 602–608 (1999)
Kyle, J., Costello, M.: Comparison of measured and simulated motion of a scaled dragline excavation system. Math. Comput. Model. 44(4), 816–833 (2006)
Frost, G., Costello, M.: Improved deployment characteristics of a tether-connected munition system. J. Guid. Control Dyn. 24(3), 547–554 (2001)
Aglietti, G.: Dynamic response of a high-altitude tethered balloon system. J. Aircr. 46(6), 2032–2040 (2009)
Hembree, B., Slegers, N.: Tethered aerostat modeling using and efficient recursive rigid-body approach. J. Aircr. 48(6), 623–632 (2011)
Pointbriand, P., Nahon, M.: Experimental testing and modeling of a tethered spherical aerostat in an outdoor environment. J. Wind Eng. Ind. Aerodyn. 97, 208–218 (2009)
de Haan, Y.M., Sluimer, G.M.: Standard Linear Solid Model for dynamic and time dependent behaviour of building materials. Heron 46(1), 49–76 (2001)
Hembree, B., Slegers, N.: Efficient dynamic model formulation using recursive rigid-body dynamics. Proc. Inst. Mech. Eng., Proc., Part K, J. Multi-Body Dyn., 224(4), 353–363 (2010)
Bauchau, O.A., Bottasso, C.L., Nikishkov, Y.G.: Modeling rotorcraft dynamics with finite element multibody procedures. Math. Comput. Model. 33, 1113–1137 (2001)
Bauchau, O.A., Rodriguez, J.: Formulation of modal based elements in nonlinear, flexible multibody dynamics. Int. J. Multiscale Comput. Eng. 1, 161–180 (2003)
Wu, L., Tiso, P.: Nonlinear model order reduction for flexible multibody dynamics: a modal derivatives approach. Multibody Syst. Dyn. 36(4), 405–425 (2015)
Zhao, J., Zhao, R., Xue, Z., Yu, K.: A new modeling method for flexible multibody systems. Multibody Syst. Dyn. 35(2), 179–190 (2014)
Kuipers, J.: Quaternions and Rotation Sequences, pp. 103–136. Princeton University Press, New Jersey (1999)
White, F.M.: Fluid Mechanics, 2nd ed. McGraw-Hill, New York (1986)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Hembree, B., Slegers, N. Comparison of experimental and simulated motion for discrete tether models. Multibody Syst Dyn 41, 233–258 (2017). https://doi.org/10.1007/s11044-016-9551-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-016-9551-6