
Abstract
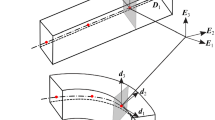
The dynamic modeling of a sliding joint on a one-dimensional medium, such as a cable or a beam, is studied in this paper. The sliding joint is implemented by positioning it at a moving node on the one-dimensional medium, which is realized by variable-length elements at either side of the joint. The variable-length element is established with an absolute nodal coordinate formulation (ANCF) in the framework of the Arbitrary Lagrange–Euler (ALE) description. The sliding of the joint is described by the increasing of the length on one side of the one-dimensional medium and a corresponding decreasing of the other side. In order to capture the discontinuity of the slopes at the position of the sliding joint, the moving node has two slopes as generalized coordinates which are equal to each other in the case of a beam but not in the case of a cable, and in order to avoid the addition–deletion constraint, the node adjacent to the moving node is added or deleted if the element is too long or too short. The governing equations for the coupled system are derived in terms of D’Alembert’s principle and the resulting equations of motion are formulated in the standard form of differential algebraic equations of multibody systems. Numerical examples are presented to validate the method proposed by comparing with analytical results which are available or are made possible by simplifying the model.
Similar content being viewed by others
Abbreviations
- A :
-
area of cross section of the one-dimensional medium
- E :
-
Young’s module of the one-dimensional medium
- ρ :
-
density of the one-dimensional medium
- J :
-
inertia moment of the cross section of the one-dimensional medium
- \(\mathbf{r}_{i}, \mathbf{r}_{i}'\) :
-
position and slope vector at the ith node
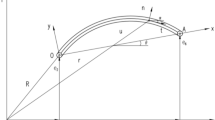
- r,r′:
-
position and slope vector at an arbitrary point
- q :
-
generalized coordinate of the element of mass-flowing one-dimensional medium
- p i :
-
material coordinate at the ith node which equals the un-deformed length from the head point of the one-dimensional medium to the ith node of the element
- p :
-
material coordinate at an arbitrary point which equals the un-deformed length from the head point of the one-dimensional medium to the arbitrary point of the element
- N :
-
shape function of the element of the one-dimensional medium
- t :
-
time
- \(\dot{\square}, \ddot{\square}\) :
-
velocity and acceleration of the parameter
- δ□:
-
variation of the parameter
- ε 0 :
-
Green’s normal strain at an arbitrary point of the element of the one-dimensional medium
- κ :
-
curvature at an arbitrary point of the element of the one-dimensional medium
References
Starrossek, U.: Cable dynamics – A review. Struct. Eng. Int. 94(3), 171–176 (1994)
Timoshenko, S.: Vibration Problems in Engineering. Wiley, New York (1974)
Kawaguti, K., Terumichi, Y., Takehara, S.: The study of the tether motion with time-varying length using the absolute nodal coordinate formulation with multiple nonlinear time scales. J. Syst. Des. Dyn. 1(3), 491–500 (2007)
Gerstmayr, J., Shabana, A.A.: Analysis of thin beams and cables using the absolute nodal coordinate formulation. Nonlinear Dyn. 45(1–2), 109–130 (2006)
Shabana, A.A.: Flexible multibody dynamics: review of past and recent developments. Multibody Syst. Dyn. 1(2), 189–222 (1997)
Shabana, A.A., Yakoub, R.Y.: Three dimensional absolute nodal coordinate formulation for beam elements: theory. J. Mech. Des. 123(4), 606–613 (2001)
Dombrowski, S.V.: Analysis of large flexible body deformation in multibody systems using absolute coordinates. Multibody Syst. Dyn. 8(4), 409–432 (2002)
Lee, S.-H.: The development of a sliding joint for very flexible multibody dynamics using absolute nodal coordinate formulation. Multibody Syst. Dyn. 20, 223–237 (2008)
Marjamäki, H.: Total Lagrangian beam element with C1-continuous slide-spring. Comput. Struct. 87, 534–542 (2009)
Sugiyama, H., Escalona, J.L., Shabana, A.A.: Formulation of three-dimensional joint constraints using the absolute nodal coordinates. J. Nonlinear Dyn. 31(2), 167–195 (2003)
Goldstein, H., Poole, C., Safko, J.: Classical Mechanics, 3rd edn. pp. 16–21. Pearson Education, Upper Saddle River (2002)
Shabana, A.A.: Dynamics of Multibody Systems, 3rd edn. Cambridge University, New York (2005)
Hairer, E., Wanner, G.: Solving Ordinary Differential Equations II: Stiff and Differential-Algebraic Problems, 2nd edn. Springer, Berlin (1996)
Hairer, E., Norsett, S.P., Wanner, G.: Solving Ordinary Differential Equations I: Nonstiff Problems, 2nd edn. Springer, Berlin (1996)
Frýba, L.: Vibration of Solids and Structures Under Moving Loads. Noordhoff, Groningen (1972). 484 pp.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Hong, D., Ren, G. A modeling of sliding joint on one-dimensional flexible medium. Multibody Syst Dyn 26, 91–106 (2011). https://doi.org/10.1007/s11044-010-9242-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-010-9242-7