
Abstract
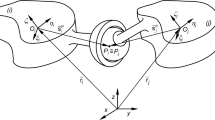
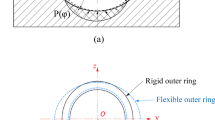
The paper proposes a multibody dynamic simulation to numerically evaluate the generated axial force (GAF) and plunging resistant force (PRF) practically related to the shudder and idling vibration of an automobile. A numerical analysis of the drive shaft coupling of a ball joint (BJ) and two plunging type joints, a tripod joint (TJ), and a very low axial force tripod joint (VTJ), are conducted using the commercial program DAFUL. User-defined subroutines of a friction model illustrating the contacted parts of the outboard and inboard joint are subsequently developed to overcome the numerical instability and improve the solution performance. The Coulomb friction effect is applied to describe the contact models of the lubricated parts in the rolling and sliding mechanisms. The numerical results, in accordance with the joint articulation angle variation, are validated with experimentation. The offset between spider and housing is demonstrated to be the critical role in producing the third order component of the axial force that potentially causes the noise and vibration in the vehicle. The VTJ shows an excellent behavior for the shudder when compared with the TJ. In addition, a flexible nonlinear contact analysis coupled with multibody dynamics is also performed to show the dynamic strength characteristics of the rollers, housing, and spider.
Similar content being viewed by others
References
Kimata, K., Nagatani, H., Imoto, M.: Analysis of ball-type constant-velocity joints based on dynamics. JSME Int. J., Ser. C 47, 736–745 (2004)
Kimata, K., Nagatani, H., Imoto, M., Kohara, T.: Numerical analyses and experiments on the characteristics of ball-type constant-velocity joints. JSME Int. J., Ser. C 47, 746–754 (2004)
Hayama, Y.: NTN corporation: dynamic analysis of forces generated on inner parts of a double offset constant velocity universal joint (DOJ): non-friction analysis. SAE Technical Paper 2001-01-1161, pp. 219–224 (2001)
Serveto, S., Mariot, J.-P., Diaby, M.: Secondary torque in automotive drive shaft ball joints: influence of geometry and friction. Proc. I MECH E Part K J. Multi-body Dyn. 222, 215–227 (2008)
Mariot, J.-P., K’nevez, J.-Y., Barbedette, B.: Tripod and ball joint automotive transmission kinetostatic model including friction. Multibody Syst. Dyn. 11, 127–145 (2004)
Watanabe, K., Kawakatsu, T., Nakao, S.: Kinematic and static analyses of tripod constant velocity joints of the spherical end spider type. J. Mech. Des. 127, 1137–1144 (2005)
Serveto, S., Mariot, J.-P., Diaby, M.: Modelling and measuring the axial force generated by tripod joint of automotive drive-shaft. Multibody Syst. Dyn. 19, 209–226 (2008)
Lee, C.-H., Polycarpou, A.A.: Experimental investigation of tripod constant velocity (CV) joint friction. In: SAE Transactions, 2006-01-0582, pp. 475–482 (2006)
NX. DAFUL Program Manual version 1.2 (2008)
Lankarani, H.: Canonical impulse-momentum equations for impact analysis of multibody system. ASME J. Mech. Des. 180, 180–186 (1992)
Craig, J.J.: Introduction to Robotics: Mechanics and Control. Addison-Wesley, Reading (1989)
Bae, D.S., Haug, E.J.: A recursive formulation for constrained mechanical system dynamics: Part II. Closed loop systems. Mech. Struct. Mach. 15, 481–506 (1987)
Yen, J.: Constrained equations of motion in multibody dynamics as ODE’s on manifolds. SIAM J. Numer. Anal. 30, 553–568 (1993)
Bae, D.S.: Development of a new multi-flexible body dynamics(MFBD) platform: a relative nodal displacement method for finite element analysis. In: Proceedings of IDETC’05, DETC2005-84723, ASME 2005 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, California, USA, September 24–28 (2005)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lim, YH., Song, ME., Lee, WH. et al. Multibody dynamics analysis of the driveshaft coupling of the ball and tripod types of constant velocity joints. Multibody Syst Dyn 22, 145–162 (2009). https://doi.org/10.1007/s11044-009-9155-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-009-9155-5