
Abstract
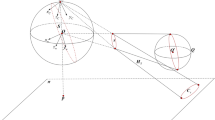
A novel linear calibration method for a camera using two coplanar circles as the calibration template is proposed. Under projective transformation, the common pole-polar and common tangent of coplanar circles maintain invariance and homogeneity, respectively. The two tangent points on the common tangent, the four intersections, and the line passing through the centers of the two coplanar circles can form two groups of vertical parallel lines. Considering duality, a common polar passes through the centers of two coplanar dual circles in various positions with their corresponding poles located at infinity. The common tangent problem was solved iteratively by employing a search algorithm. Further, in the camera model, the vanishing points are obtained by using three images including the two coplanar circle template. The internal parameters can be solved based on the constraint relationship between the imaged circular points and the imaged absolute conic(IAC). In the simulation experiment, the solution of the common tangent and the noise experiment of the internal parameters. In the real experiment, the internal parameters by each method are verified and the projection error is analyzed. The results show that the algorithm is feasible and effective.














Similar content being viewed by others
References
Barreto JP, Martin F and Horaud R (2003) “Visual servoing/tracking using central catadioptric images,” In Proceedings of the International Conference on Experimental Robotics VIII. Springer, Berlin Heidelberg, pp 245–254. https://doi.org/10.1007/3-540-36268-1_21
Canny JF (1986) A computational approach to edge detection. IEEE Trans Pattern Anal Mach Intell 8(6):678–698. https://doi.org/10.1109/TPAMI.1986.4767851
Chen Q and Wu H (2017) “Recovering projected centers of circle-pairs with common tangents,” In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), IEEE, pp 1775–1780. https://doi.org/10.1109/ICMA.2017.8016086
Chen X, Zhao Y (2015) The projected circle centres and polar line for camera self-calibration. Optik 126(20):2565–2570. https://doi.org/10.1016/j.ijleo.2015.06.036
Chen Q, Wu H and Wada T (2004) “Camera calibration with two arbitrary coplanar circles,” In Proceedings of the European Conference on Computer Vision. Springer, Berlin Heidelberg, pp 521–532. https://doi.org/10.1007/978-3-540-24672-5_41
Diwakar M, Singh P (2020) CT image denoising using multivariate model and its method noise thresholding in non-subsampled shearlet domain. Biomed Signal Process Control 57:101754
Diwakar M, Kumar P, Singh AK (2020) CT image denoising using NLM and its method noise thresholding. Multimedia Tools Applic 79(2):14449–14464
El Akkad N, Merras M, Baataoui A, Saaidi A, Satori K (2018) Camera self-calibration having the varying parameters and based on homography of the plane at infinity. Multimed Tools Appl 77(11):14055–14075. https://doi.org/10.1007/s11042-017-5012-3
Faugeras OD, Luong QT and Maybank SJ (2005) “Camera self-calibration: theory and experiments,” In Proceedings of the European Conference on Computer Vision. Springer, Berlin Heidelberg, pp 321–334. https://doi.org/10.1007/3-540-55426-2_37
Fitzgibbon A (1999) PM, and Fisher, RB:’Direct least-square of ellipse’. IEEE Trans Pattern Anal Mach Intell 21(5):476–480. https://doi.org/10.1109/34.765658
Gurdjos P, Sturm P and Wu Y, (2006) “Euclidean structure from N≥2 parallel circles: theory and algorithms,” In Proceedings of the European Conference on Computer Vision. Springer, Berlin, Heidelberg, pp 238–252. https://doi.org/10.1007/11744023_19
Gurdjos P, Kim JS and Kweon IS (2006) “Euclidean structure form confocal conics: theory and application to camera calibration,” In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (New York, NY, USA), IEEE, pp 1214–1221. https://doi.org/10.1109/CVPR.2006.115
Harris C and Stephens M (1988) “A combined corner and edge detector,” In Proceedings of the International Conference on ALVEY Vision, pp 147–151
Hartley R, Zisserman A (2003) Multiple View Geometry in Computer Vision. Cambridge Univ Press, Cambridge
Huang H, Zhang H, and Cheung Y (2016) “The common self-polar triangle of separate circles: properties and applications to camera calibration,” In Proceedings of the IEEE International Conference on Image Processing. IEEE, Phoenix, pp 1170–1174. https://doi.org/10.1109/ICIP.2016.7532542
Huang H, Zhang H and Cheung Y (2015) “The common self-polar triangle of concentric circles and its application to camera calibration,” In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE, Boston, pp 4065–4072. https://doi.org/10.1109/CVPR.2015.7299033
Kim JS, Gurdjos P, Kweon IS (2005) Geometric and algebraic constraints of projected concentric circles and their applications to camera calibration. IEEE Trans Pattern Anal Mach Intell 27(4):637–642. https://doi.org/10.1109/TPAMI.2005.80
Liang S, Zhao Y (2020) Camera calibration based on the common pole-polar properties between two coplanar circles with various positions. Appl Opt 59(17):5167–5178. https://doi.org/10.1364/AO.388109
Marr D (1982) Vision: A computational Investigation into the Human Representation and Processing of Visual Information. Henry Holt and Company, Inc Press, New York
Meng X, Hu Z (2003) A new easy camera calibration technique based on circular points. Pattern Recogn 36(5):1155–1164. https://doi.org/10.1016/s0031-3203(02)00225-x
Qi F, Li Q, Luo Y, Hu D (2007) Constraints on general motions for camera calibration with one-dimensional objects. Pattern Recogn 40(6):1785–1792. https://doi.org/10.1016/j.patcog.2006.11.001
Semple JG, Kneebone GT (1999) Algebraic Projective Geometry. Clarendon Press, Oxford
Shih SW, Hung YP and Lin WS (1992) “Efficient and accurate camera calibration technique for 3-D computer vision,” In Proceedings of the SPIE International Conference on Optics, Illumination, and Image Sensing for Machine Vision VI. SPIE, Boston, pp 133–145. https://doi.org/10.1117/12.57975
Sun J, Chen X, Gong Z, Liu Z, Zhao Y (2015) Accurate camera calibration with distortion models using sphere images. Opt Laser Technol 65(2):83–87. https://doi.org/10.1016/j.optlastec.2014.07.009
Tarjan R (1972) Depth-first Search and linear graph algorithms. SIAM J Comput 1(2):146–160. https://doi.org/10.1137/0201010
Wang Y, Zhao Y (2019) Paracatadioptric camera calibration based on the projecting relationship of the relative position between two spheres. Multimed Tools Appl 78(9):12223–12249. https://doi.org/10.1007/s11042-018-6763-1
Wong KYK, Zhang G, Chen Z (2011) A stratified approach for camera calibration using spheres. IEEE Trans Image Process 20(2):305–316. https://doi.org/10.1109/TIP.2010.2063035
Wu FC, Hu ZY, Zhu HJ (2005) Camera calibration with moving one-dimensional objects. Pattern Recogn 38(5):755–765. https://doi.org/10.1016/j.patcog.2004.11.005
WuY, Zhu H, Hu Z and Wu F (2004) “Camera calibration from the quasi-affine invariance of two parallel circles,” In Proceedings of the European Conference on Computer Vision, pp. 190–202. https://doi.org/10.1007/978-3-540-24670-1_15.
Yang F, Zhao Y, Wang X (2019) Calibration of camera intrinsic parameters based on the properties of the polar of circular points. Appl Opt 58(22):5901–5909. https://doi.org/10.1364/AO.58.005901
Ying X and Zha H (2007) “Camera calibration using principal-axes aligned conics,” In Proceedings of the Asian Conference on Computer Vision. Springer, Berlin, Heidelberg, pp 138–148. https://doi.org/10.1007/978-3-540-76386-4_12
Yu J, Da F (2018) Bi-tangent line based approach for multi-camera calibration using spheres. J Opt Soc Am A 35(2):221–229. https://doi.org/10.1364/JOSAA.35.000221
Zhang Z (2000) A flexible new technique for camera calibration. IEEE Trans Pattern Anal Mach Intell 22(11):1330–1334. https://doi.org/10.1109/34.888718
Zhang Z (2004) Camera calibration with one-dimensional objects. IEEE Trans Pattern Anal Mach Intell 26(7):892–899. https://doi.org/10.1109/TPAMI.2004.21
Zhao Z, Weng Y (2014) Recovering Euclidean structure from principal-axes paralleled conics: applications to camera calibration. J Opt Soc Am A 31(6):1186–1193. https://doi.org/10.1364/JOSAA.31.001186
Funding
This study was supported in part by the National Natural Science Foundation of China (NSFC) (61663048 and 11861075), Programme for Innovative Research Team (in Science and Technology) in Universities of Yunnan Province, and the Key Joint Project of the Science and Technology Department of Yunnan Province and Yunnan University (2018FY001(-014)).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Research involving human participants and/or animals
This article does not contain any studies with human participants performed by any of the authors.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liang, S., Zhao, Y. Common pole-polar and common tangent properties of dual coplanar circles and their application in camera calibration. Multimed Tools Appl 83, 381–401 (2024). https://doi.org/10.1007/s11042-023-15684-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-023-15684-4