
Abstract
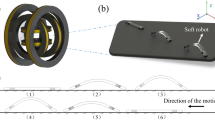
A mathematical model for the motion of a mobile robot that can be controlled using an alternating magnetic field is proposed. The robot is composed of two spherical bodies with a magnetizable material and a non-magnetic elastic coupling. It moves along the bottom of a vessel filled with a liquid. An easy-to-implement alternating (pulsating) uniform magnetic field inclined to a horizontal plane is used to control the robot. The impact of the problem parameters (frequency, tilt angle and magnitude of the magnetic field, viscosity and density of the surrounding liquid, coefficient of friction between the robot and the bottom of the vessel, length of the robot) on the motion of the robot is studied. It is determined that the frequency of the magnetic field, the liquid viscosity and density can reverse the direction of the robot motion.










Similar content being viewed by others
References
Zimmermann K, Zeidis I, Behn C (2009) Mechanics of terrestrial locomotion. Springer, Berlin
Gidoni P, DeSimone A (2017) Stasis domains and slip surfaces in the locomotion of a bio-inspired two-segment crawler. Meccanica 52:587–601. https://doi.org/10.1007/s11012-016-0408-0
Chernousko F (2016) Two-dimensional motions of a body containing internal moving masses. Meccanica 51(12):3203–3209. https://doi.org/10.1007/s11012-016-0511-2
Chernousko FL (2017) Locomotion principles for mobile robotic systems. Procedia Comput Sci 103:613–617. https://doi.org/10.1016/j.procs.2017.01.081
Chernousko FL (2018) Locomotion of multibody robotic systems: dynamics and optimization. Theor Appl Mech 45(1):17–33. https://doi.org/10.2298/tam171017001c
Nguyen K-T, La N-T, Ho K-T, Ngo Q-H, Chu N-H, Nguyen V-D (2021) The effect of friction on the vibro-impact locomotion system: modeling and dynamic response. Meccanica 56:2121–2137. https://doi.org/10.1007/s11012-021-01348-w
Liang G, Luo H, Li M, Qian H, Lam TL (2020) FreeBOT: a freeform modular self-reconfigurable robot with arbitrary connection point—design and implementation. In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, pp 6506–6513. https://doi.org/10.1109/IROS45743.2020.9341129
Hawkes E, An B, Benbernou NM, Tanaka H, Kim S, Demaine ED, Rus D, Wood RJ (2010) Programmable matter by folding. PNAS 107(28):12441–12445. https://doi.org/10.1073/pnas.0914069107
Miyashita S, Guitron S, Ludersdorfer M, Sung SR, Rus D (2015) An untethered miniature origami robot that self-folds, walks, swims, and degrades. In: 2015 IEEE international conference on robotics and automation (ICRA), IEEE, pp 1490–1496. https://doi.org/10.1109/ICRA.2015.7139386
Miyashita S, Guitron S, Yoshida K, Li S, Damian DD, Rus D (2016) Ingestible, controllable, and degradable origami robot for patching stomach wounds. In: 2016 IEEE international conference on robotics and automation (ICRA), IEEE, pp 909–916. https://doi.org/10.1109/ICRA.2016.7487222
Liu Y, Páez Chávez J, Zhang J, Tian J, Guo B, Prasad S (2020) The vibro-impact capsule system in millimetre scale: numerical optimisation and experimental verification. Meccanica 55:1885–1902. https://doi.org/10.1007/s11012-020-01237-8
Zimmermann K, Zeidis I, Böhm V, Popp J, Naletova VA, Turkov VA, Bayburtskiy FS, Stepanov GV (2007) Verfahren und Vorrichtung zur Erzeugung einer apedalen translatorischen Bewegung. Patent DE 10 2006 059 537 BE
Dreyfus R, Baudry J, Roper ML, Fermigier M, Stone HA, Bibette J (2005) Microscopic artificial swimmers. Nature 437(7060):862–865. https://doi.org/10.1038/nature04090
Cebers A (2003) Dynamics of a chain of magnetic particles connected with elastic linkers. J Condens Matter Phys 15:1335–1344. https://doi.org/10.1088/0953-8984/15/15/303
Cebers A (2005) Flexible magnetic swimmer. Magnetohydrodynamics 41(1):63–72. https://doi.org/10.22364/mhd.41.1.5
Özdemir İ (2019) Magnetically driven foldable shell type swimmers at Stokes flow. Meccanica 54:1083–1102. https://doi.org/10.1007/s11012-019-01013-3
Qiu T, Lee TC, Mark AG, Morozov KI, Münster R, Mierka O, Turek S, Leshansky AM, Fisher P (2014) Swimming by reciprocal motion at low Reynolds number. Nat Commun 5:5119. https://doi.org/10.1038/ncomms6119
Li T, Li J, Morozov KI, Wu Z, Xu T, Rozen I, Leshansky AM, Li L, Wang J (2017) Highly efficient freestyle magnetic nanoswimmer. Nano Lett 17(8):5092–5098. https://doi.org/10.1021/acs.nanolett.7b02383
Zimmermann K, Zeidis I, Naletova VA, Turkov VA, Bayburtskiy FS, Lukashevich MV, Böhm V (2006) Elastic capsule filled with magnetic fluid in an alternative magnetic field. In: Euromech colloquium 470 “Recent development in ferrofluid research”, TU Dresden, pp 41–42
Saga N, Nakamura T (2002) Elucidation of propulsive force of microrobot using magnetic fluid. J Appl Phys 91(10):7003–7005. https://doi.org/10.1063/1.1452197
Saga N, Nakamura T (2004) Development of a peristaltic crawling robot using magnetic fluid on the basis of the locomotion mechanism of the earthworm. Smart Mater Struct 13(3):566–569. https://doi.org/10.1088/0964-1726/13/3/016
Zimmermann K, Zeidis I, Naletova VA, Stepanov GV, Turkov VA, Lukashevich MV (2005) Undulation of a magnetizable elastic body in a magnetic field. In: Proceedings of Moscow International Symposium on Magnetism (MISM), Lomonosov Moscow State University, Faculty of Physics Publisher, pp 86–89
Zimmermann K, Naletova VA, Zeidis I, Turkov VA, Kolev E, Lukashevich MV, Stepanov GV (2007) A deformable magnetizable worm in a magnetic field—a prototype of a mobile crawling robot. J Magn Magn Mater 311(1):450–453. https://doi.org/10.1016/j.jmmm.2006.11.153
Zimmermann K, Zeidis I, Naletova VA, Kalmykov SA, Turkov VA (2011) Model of a thin rod with viscoelastic magnetizable material in the alternating magnetic field. Solid State Phenom 190:629–632. https://doi.org/10.4028/www.scientific.net/SSP.190.629
Kalmykov SA, Naletova VA, Turkov VA (2013) Motion of a slender body made of magnetizable composite in a traveling magnetic field. Fluid Dyn 48(1):4–13. https://doi.org/10.1134/S001546281301002X
Kim Y, Yuk H, Zhao R, Chester SA, Zhao X (2018) Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 558:274–279. https://doi.org/10.1038/s41586-018-0185-0
Hu W, Lum GZ, Mastrangeli M, Sitti M (2018) Small-scale soft-bodied robot with multimodal locomotion. Nature 554:81–85. https://doi.org/10.1038/nature25443
Schmauch MM, Mishra SR, Evans BA, Velev OD, Tracy JB (2017) Chained iron microparticles for directionally controlled actuation of soft robots. ACS Appl Mater Interfaces 9(13):11895–11901. https://doi.org/10.1021/acsami.7b01209
Xu C, Yang Z, Lum GZ (2021) Small-scale magnetic actuators with optimal six degrees-of-freedom. Adv Mater 33:2100170. https://doi.org/10.1002/adma.202100170
Li Y, Qi Z, Yang J, Zhou M, Zhang X, Ling W, Zhang Y, Wu Z, Wang H, Ning B, Xu H, Huo W, Huang X (2019) Origami NdFeB flexible magnetic membranes with enhanced magnetism and programmable sequences of polarities. Adv Funct Mater 29:1904977. https://doi.org/10.1002/adfm.201904977
Qi Z, Zhou M, Li Y, Xia Z, Huo W, Huang X (2021) Reconfigurable flexible electronics driven by origami magnetic membranes. Adv Mater Technol 6:2001124. https://doi.org/10.1002/admt.202001124
Ha M, Cañón Bermúdez GS, Liu JAC, Oliveros ES, Evans BA, Tracy JB, Makarov D (2021) Reconfigurable magnetic origami actuators with on-board sensing for guided assembly. Adv Mater 33:2008751. https://doi.org/10.1002/adma.202008751
Wang X, Mao G, Ge J, Drack M, Cañón Bermúdez GS, Wirthl D, Illing R, Kosub T, Bischoff L, Wang C, Fassbender J, Kaltenbrunner M, Makarov D (2020) Untethered and ultrafast soft-bodied robots. Commun Mater 1:67. https://doi.org/10.1038/s43246-020-00067-1
Merkulov DI, Pelevina DA, Turkov VA, Vinogradova AS, Naletova VA (2021) Mobile robots with magnetizable materials in uniform magnetic fields. Acta Astronaut 181:579–584. https://doi.org/10.1016/j.actaastro.2020.11.052
Yung KW, Landecker PB, Villani DD (1998) An analytic solution for the force between two magnetic dipoles. Magn Electr Separ 9:39–52. https://doi.org/10.1155/1998/79537
Landau LD, Lifshitz EM (1960) Electrodynamics of continuous media. Pergamon, Oxford
Happel J, Brenner H (1965) Low Reynolds number hydrodynamics. Prentice-Hall, Hoboken
Bolotnik N, Pivovarov M, Zeidis I, Zimmermann K (2016) On the motion of lumped-mass and distributed-mass self-propelling systems in a linear resistive environment. ZAMM 96(6):747–757. https://doi.org/10.1002/zamm.201500091
Pelevina DA, Turkov VA, Kalmykov SA, Naletova VA (2015) Motions of objects with magnetizable materials along a horizontal plane in a rotating magnetic field. J Magn Magn Mater 390:20–25. https://doi.org/10.1016/j.jmmm.2015.04.068
Zimmermann K, Zeidis I, Bolotnik N, Pivovarov M (2009) Dynamics of a two-module vibration-driven system moving along a rough horizontal plane. Multibody Syst Dyn 22:199–219. https://doi.org/10.1007/s11044-009-9158-2
Zimmermann K, Zeidis I (2011) Dynamical behavior of a mobile system with two degrees of freedom near the resonance. Acta Mech Sin 27(1):7–17. https://doi.org/10.1007/s10409-011-0403-6
Zakinyan AR, Mkrtchan LS, Dikansky YuI (2013) Dynamics of magnetic fluid droplets on a solid surface in a rotating magnetic field. In: IV All-Russian scientific conference “Physicochemical and applied problems of magnetic dispersed nanosystems”, North Caucasus Federal University, Stavropol, pp 96–100 (in Russian)
Zakinyan A, Nechaeva O, Dikansky Yu (2012) Motion of a deformable drop of magnetic fluid on a solid surface in a rotating magnetic field. Exp Therm Fluid Sci 39:265–268. https://doi.org/10.1016/j.expthermflusci.2012.01.003
Funding
The study is supported by the Grant of the Russian Science Foundation (Project No. 20-71-10002).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Tkachenko, E.A., Merkulov, D.I., Pelevina, D.A. et al. Mathematical model of a mobile robot with a magnetizable material in a uniform alternating magnetic field. Meccanica 58, 357–369 (2023). https://doi.org/10.1007/s11012-022-01486-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-022-01486-9