
Abstract
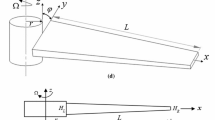
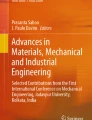
In this paper, an analysis for active constrained layer damping (ACLD) of rotating composite beams undergoing geometrically non linear vibrations has been carried out. Commercially available vertically/obliquely reinforced 1-3 piezoelectric composite (PZC) material has been used as the material of the constraining layer of the ACLD treatment. A finite element (FE) model has been derived to carry out the analysis. The substrate beam is considered thin and hence, first order shear deformation theory (FSDT) and von-Karman type nonlinear strain–displacement relations are used to derive the coupled electromechanical nonlinear FE model. The rotary effect has been suitably modelled by incorporating extensional strain energy due to centrifugal force. The Golla–Hughes–McTavish method has been employed to model the constrained viscoelastic layer of the ACLD treatment in the time domain. The numerical responses revealed that the ACLD treatment with 1-3 PZC constraining layer efficiently performs the task of active damping of geometrically nonlinear vibrations of the rotating composite beams. The effects of the fibre orientation angles of the angle-ply substrate beams and the 1-3 PZC constraining layer on the ACLD of the geometrically nonlinear vibrations have been investigated. Also, the effect of the thickness variations of the 1-3 PZC layer and the viscoelastic constrained layer on the damping characteristics of the overall rotating composite beams has been studied.

















Similar content being viewed by others

References
Aboudi, J.: Micromechanical prediction of the effective coefficients of thermo-piezoelectric multiphase composites. J. Intell. Mater. Syst. Struct. 9, 713–722 (1998)
Baily, T., Hubbard, J.E.: Distributed piezoelectric-polymer active vibration control of a cantilever beam. J. Guid. Control Dyn. 8(5), 605–611 (1985)
Banerjee, J.R.: Dynamic stiffness formulation and free vibration analysis of centrifugally stiffened Timoshenko Beams. J. Sound Vib. 56(2), 175–185 (2001)
Baz, A., Ro, J.: Active constrained layer damping. In: Proceeding of Damping 93, San Francisco, 1993, p. IBB 1–23
Baz, A., Poh, S.: Performance of an active control system with piezoelectric actuators. J. Sound Vib. 126, 327–343 (1988)
Baz, A., Ro, J.: Vibration control of plates with active constrained layer damping. Smart Mater. Stuct. 5, 272–280 (1996)
Baz, A., Ro, J.: Vibration control of rotating beams with active constrained layer damping. Smart Mater. Struct. 10, 112–120 (2001)
Bennouna, M.M.K.: Nonlinear dynamic behaviour of a clamped–clamped beam with consideration of fatigue life, Ph.D. Thesis, University of Southampton (1982)
Choi, S.-C., Park, J.-S., Kim, J.-H.: Active damping of rotating thin-walled beams using MFC actuators and PVDF sensors. Compos. Struct. 76, 362–374 (2005)
Crawley, E.F., de Luis, J.: Use of piezoelectric actuators as element of intelligent structures. AIAA J. 25(10), 1373–1385 (1987)
Dokainish, M.A., Rawtani, S.: Vibration analysis of rotating cantilever plates. Int. J. Numer. Methods Eng. 3, 233–248 (1971)
Dunn, M.L., Taya, M.: Micromechanics predictions of the effective electroelastic moduli of piezoelectric composites. J. Solids Struct. 30(2), 161–175 (1993)
Fung, E.H.K., Yau, D.T.W.: Vibration characteristics of a rotating flexible arm with ACLD treatment. J. Sound Vib. 269, 165–182 (2003)
Fung, E.H.K., Zou, J.Q., Lee, H.W.J.: Lagrangian formulation of rotating beam with active constrained layer damping in time domain analysis. J. Mech. Des. 126, 359–364 (2004)
Golla, D.F., Hughes, P.C.: Dynamics of viscoelastic structures: a time domain, finite element formulations. ASME J. Appl. Mech. 52, 897–906 (1985)
Ha, S.K., Keilers, C., Chang, F.K.: Finite element analysis of composite structures containing piezoceramic sensors and actuators. AIAA J. 30, 772–780 (1992)
Hellen, L.C., Kun, L., Chung, L.C.: Piezoelectric ceramic fibre/epoxy 1–3 composite for high frequency ultrasonic transducer application. Mater. Sci. Eng. B99, 29–35 (2003)
Im, S., Atluri, S.N.: Effects of a piezo-actuator on a finitely deformed beam subjected to general loading. AIAA J. 27, 1801–1807 (1989)
Park, J.-S., Kim, J.-H.: Design and aeroelastic analysis of active rotor blades incorporating single crystal macro fibre composite actuators. Composites B 39, 1011–1025 (2008)
Kumar, N., Singh, S.P.: Vibration and damping characteristics of beams with active constrained layer treatment under parametric variations. Mater. Des. 30, 4162–4174 (2009)
Lee, C.K.: Theory of laminated piezoelectric plates for the design of distributed sensors/actuators. Part I: governing equations and reciprocal relationships. J. Acoust. Soc. Am. 87, 1144–1158 (1990)
Lee, S.Y., Kuo, Y.H.: Bending frequency of a rotating Timoshenko beam with general elastically restrained root. J. Sound Vib. 162, 243–250 (1993)
Lee, T.-S., Lin, Y.-J.: Nonlinear dynamic strain analysis on rotor blade structures with embedded piezoceramic sensors for active vibration control. Mechatronics 8(8), 805–820 (1998)
Li, F.M., Kishimoto, K., Wang, Y.S., Chen, Z.B., Huang, W.H.: Vibration control of beams with active constrained layer damping. Smart Mater. Struct. 17, 065036 (2008)
Lim, Y.H., Varadan, V.V., Varadan, K.V.: Closed looped finite element modelling of active constrained layer damping in the time domain analysis. Smart Mater. Struct. 11, 89–97 (2002)
McTavish, D.J., Hughes, P.C.: Modelling of linear viscoelastic space structures. ASME J. Vib. Acoust. 115, 103–133 (1993)
Panda, S., Ray, M.C.: Active constrained layer damping of geometrically nonlinear vibrations of functionally graded plates using piezoelectric fibre-reinforced composites. Smart Mater. Struct. 17, 0250112 (2008)
Plunkett, R., Lee, C.T.: Length Optimization for constrained viscoelastic layer damping. J. Acoust. Soc. Am. 48, 150–161 (1970)
Putter, S., Manor, H.: Natural frequencies of radial rotating beams. J. Sound Vib. 56(2), 175–185 (1978)
Rao, J.S., Carnegie, W.: Non-linear vibration of rotating cantilever beams. Aeronaut. J. R. Aeronaut. Soc. 74, 161–165 (1970)
Rao, S.S., Gupta, R.S.: Finite element vibration analysis of rotating Timoshenko Beams. J. Sound Vib. 242(1), 103–124 (2001)
Rao, S.S., Sunar, M.: Analysis of distributed thermopiezoelastic sensors and actuators in advanced intelligent structures. AIAA J. 31, 1280–1286 (1993)
Ray, M.C.: Optimal control of laminated plate with piezoelectric sensor and actuator layers. AIAA J. 36(12), 2204–2208 (1998)
Ray, M.C., Baz, A.: Optimization of energy dissipation of active constrained layer damping treatments of plate. J. Sound Vib. 208(3), 391–406 (1997)
Ray, M.C., Mallik, N.: Active control of laminated composite beams using a piezoelectric fibre reinforced composite layer. Smart Mater. Struct. 13, 146–152 (2004)
Ray, M.C., Pradhan, A.K.: The performance of vertically reinforced 1-piezoelectric composites in active damping of smart actuators. Smart Mater. Struct. 15, 631–641 (2006)
Ray, M.C., Shivakumar, J.: Active constrained layer damping of geometrically non-linear transient vibration of composite plates using piezoelectric fibre reinforced composite. Thin Walled Struct. 47, 178–189 (2009)
Ray, M.C., Bhattacharyya, R., Samanta, B.: Finite element model for active control of intelligent structures. AIAA J. 34(9), 1885–1893 (1996)
Ray, M.C., Bhattacharyya, R., Samanta, B.: Exact solutions for dynamic analysis of composite structures with distributed piezoelectric sensors and actuators. Comput. Struct. 66(6), 737–743 (1998)
Reberio, P., Petyt, M.: Nonlinear vibration of beams with internal resonance by hierarchical finite element method. J. Sound Vib. 224(4), 591–624 (1999)
Reddy, J.N.: On laminated composite plate with integrated sensors and actuators. Eng. Struct. 21, 568–593 (1999)
Reddy, J.N.: Mechanics of Laminated Composite Plates and Shells—Theory and Analysis, 2nd edn. CRC Press, Boca Raton (2003)
Sarangi, S.K., Ray, M.C.: Smart damping of geometrically nonlinear vibration of laminated composite beams using vertically reinforced 1–3 piezoelectric composite. Smart Mater. Struct. 19, 75020 (2010)
Smith, W.A., Auld, B.A.: Modelling 1–3 composite piezoelectric: thickness-mode oscillations. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 38(1), 40–47 (1991)
Vell, S.S., Batra, R.C.: Three dimensional analytical solutions for hybrid multi-layered piezoelectric plates. ASME J. Appl. Mech. 67, 558–567 (2000)
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
Appendix 2
Appendix 3
Rights and permissions
About this article
Cite this article
Biswas, D., Ray, M.C. Active constrained layer damping of geometrically nonlinear vibration of rotating composite beams using 1-3 piezoelectric composite. Int J Mech Mater Des 9, 83–104 (2013). https://doi.org/10.1007/s10999-012-9207-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10999-012-9207-5