
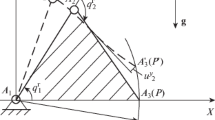
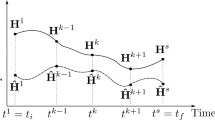
We investigate the problem of optimization of motion laws and design parameters of a four-link manipulator with a closed-chain kinematic structure. The manipulator performs cyclic transfer operations in a horizontal plane under the action of active and passive (springs and dampers) actuators. As a minimization criterion, we take a quadratic (with respect to control moments of forces) functional. An algorithm is proposed for constructing a suboptimal solution of the formulated problem based on parametrization of the generalized coordinates of the manipulator with a family of given functions and on the use of numerical procedures of mathematical programming.
Similar content being viewed by others

References
L. D. Akulenko and N. N. Bolotnik, “Synthesis of optimal control of transport motions of manipulation robots,” Izv. Akad. Nauk SSSR. Mekh. Tverd. Tela, No. 4, 21–29 (1986).
I. E. Anufriev, A. B. Smirnov, and E. N. Smirnova, MATLAB 7 [in Russian]. BKhV-Peterburg, St. Petersburg (2005).
M. S. Bazaraa and C. M. Shetti, Nonlinear Programming: Theory and Algorithms, John Wiley & Sons, New York (1979).
V. E. Berbyuk and A. E. Boström, “Optimization problems of controlled multibody systems having spring-damper drives,” Prikl. Mekh., 37, No. 7. 115–123 (2001); English translation: Int. Appl. Mech., 37, No. 7, 935–940 (2001).
V. E. Berbyuk, M. V. Demydyuk, and B. A. Lytvyn, “Parametric optimization of motion and stiffness characteristics of passive drives of a bipedal walking robot,” Visn. Kyiv. Univ. Kibern., No. 3, 7–9 (2002).
V. E. Berbyuk and M. I. Kudin, “Mathematical modeling of the suboptimal motion of semipassively controlled mechanical systems,” Mat. Met. Fiz.-Mekh. Polya, 42, No. 3, 117–124 (1999).
M. V. Demydyuk, B. A. Lytvyn, and B. M. Holub, “Parametric optimization of motion of a bipedal robot,” Mat. Met. Fiz.-Mekh. Polya, 48, No. 3, 162–171 (2005).
M. V. Demydyuk and M. I. Shyrko, “Optimization of motion modes and parameters of a two-link manipulator with active and passive drives,” Mat. Met. Fiz.-Mekh. Polya, 50, No. 2, 183–190 (2007).
G. A. Korn and T. M. Korn, Mathematical Handbook for Scientists and Engineers, McGraw-Hill, New York–Toronto–London (1968).
N. N. Krasovskii, Theory of Motion Control [in Russian], Vol. 2, Nauka, Moscow (1968).
V. I. Krylov, V. V. Bobkov, and P. I. Monastyrnyi, Computational Methods [in Russian], Vol. 2, Nauka, Moscow ( 1977).
A. I. Lur’e, Analytical Mechanics [in Russian], Fizmatgiz, Moscow (1961).
F. L. Chernous’ko, N. N. Bolotnik, and V. G. Gradetskii, Manipulation Works: Dynamics, Control, and Optimization [in Russian], Nauka, Moscow (1989).
S. Chesse and G. Bessonnet, “Optimal dynamics of constrained multibody systems. Application to bipedal walking synthesis,” in: Proc. of the IEEE Int. Conf. on Robotics & Automation, Seoul (2001), pp. 2499–2505.
M. Lidberg and V. Berbyuk, “Optimization of controlled motion of closed-loop chain manipulator robots with different degree and type of actuation,” SACTA, 4, No. 2, 56–73 (2002).
M. Nagurka and V. Yen, “Fourier-based optimal control of nonlinear dynamic systems,” Trans. ASME. J. Dynam. Syst. Meas. Contr., 112, No. 3, 19–26 (1990).
Y. Nakamura and M. Ghodoussi, “Dynamic computation of closed-link robot mechanism with nonredundant and redundant actuators,” IEEE. Trans. Robot. Autom., 5, 294–302 (1989).
Y. Zhang, W. Gruver, and F. Gao, “Dynamic simplification of three degrees of freedom manipulators with closed chains,” Robot. Autonom. Syst., 28, 261–269 (1999).
Author information
Authors and Affiliations
Additional information
Translated from Matematychni Metody ta Fizyko-Mekhanichni Polya, Vol. 52, No. 1, pp. 193–202, January–March, 2009.
Rights and permissions
About this article
Cite this article
Demydyuk, M.V. Parametric optimization of a four-link close-chain manipulator with active and passive actuators. J Math Sci 168, 746–758 (2010). https://doi.org/10.1007/s10958-010-0023-x
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10958-010-0023-x