
Abstract
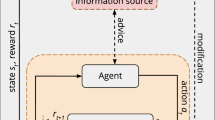
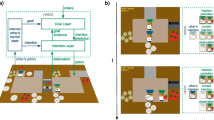
When a human user interacts with an adaptive agent to achieve human-agent collaboration, active adaptation is considered to be one of the critical characteristics of the agent. In order to investigate the principal features of active adaptation, we developed a human-agent collaborative experimental environment called WAITER (waiter agent interactive training experimental restaurant) and conducted two types of experiments, a Wizard of OZ (WOZ) agent experiment and an autonomous agent experiment. The objective of these experiments is to observe how human users perceive the agents and change their instructions when interacting with adaptive agents. The results indicate that humans can recognize changes in the agent’s actions and change their instruction methods accordingly. This implies that active adaptation of the agents may encourage the adaptation of the human users and help to build an adaptation loop between them. The experimental results also suggest that active adaptation may play an important role in a human-agent collaborative task.






Similar content being viewed by others

References
Bishop, C. M. (2007). Pattern recognition and machine learning (information science and statistics). Springer.
Cooper, G. F. (1995). A Bayesian method for learning belief networks that contain hidden variables. Journal of Intelligent Information Systems, 4(1), 71–88.
Goldman, C. V., Rosenschein, J. S., & Rosenschein, J. S. (1996). Incremental and mutual adaptation in multiagent systems. Tech. rep., Institute of Computer Science, The Hebrew University.
Kaplan, F., Oudeyer, P. Y., Kubinyi, E., & Miklosi, A. (2002). Robotic clicker training. Robotics and Autonomous Systems, 38(3–4), 197–206.
Komatsu, T., Utsunomiya, A., Suzuki, K., Ueda, K., Hiraki, K., & Oka, N. (2005). Experiments toward a mutual adaptive speech interface that adopts the cognitive features humans use for communication and induces and exploits users’ adaptation. International Journal of Human-Computer Interaction, 18(3), 243–268.
Maes, P. (1994). Modeling adaptive autonomous agents. Artificial Life, 1(1–2), 135–162.
MathWorks Inc. (2010). Creating a graphical user interface. Website: http://www.mathworks.com/demos/matlab/creating-a-graphical-user-interface-matlab-video-tutorial.html. Accessed 1 August 2010.
Silvia, S., & Analia, A. (2005). An interface agent approach to personalize users’ interaction with databases. Journal of Intelligent Information Systems, 25(3), 251–273.
Thomaz, A. L., & Breazeal, C. (2008). Teachable robots: Understanding human teaching behavior to build more effective robot learners. Artificial Intelligence, 172, 716–737.
Wooldridge, M. (2000). Reasoning about rational agents. The MIT.
Xu, Y., Ohmoto, Y., Okada, S., Ueda, K., Komatsu, T., Okadome, T., et al. (2010). Formation conditions of mutual adaptation in human-agent collaborative interaction. Applied Intelligence. doi:10.1007/s10489-010-0255-y.
Xu, Y., Ohmoto, Y., Ueda, K., Komatsu, T., Okadome, T., Kamei, K., et al. (2008). Two-layered communicative protocol model in a cooperative directional guidance task. In The 7th international workshop on social intelligence design. Puerto Rico.
Xu, Y., Ohmoto, Y., Ueda, K., Komatsu, T., Okadome, T., Kamei, K., et al. (2009a). A platform system for developing a collaborative mutually adaptive agent. In International conference on industrial, engineering & other applications of applied intelligent systems (IEA/AIE 2009). Lecture notes in computer science: Next-generation applied intelligence (Vol. 5579, pp. 576–585). Berlin: Springer.
Xu, Y., Ueda, K., Komatsu, T., Okadome, T., Hattori, T., Sumi, Y., et al. (2009b). Woz experiments for understanding mutual adaptation. Journal of AI & Society, 23(2), 201–212.
Yamada, S., & Kakusho, K. (2003). IDEA: Interaction design for adaptation (in Japanese). Journal of Japan Society for Fuzzy Theory and Intelligent Informatics, 15(2), 185.
Yamada, S., & Yamaguchi, T. (2004). Training AIBO like a dog. In The 13th international workshop on robot and human interactive communication (ROMAN-2004) (pp. 431–436). Kurashiki, Japan.
Yamada, S., & Yamaguchi, T. (2005). Mutual adaptation of mind mappings between a human and a life-like agent. Journal of Japan Society for Fuzzy Theory and Intelligent Informatics, 17(3), 289–297.
Yamasaki, N., & Anzai, Y. (1995). Active interface for human-robot interaction. In IEEE International Conference on Robotics and Automation, 3, 3103–3109.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Xu, Y., Ohmoto, Y., Ueda, K. et al. Active adaptation in human-agent collaborative interaction. J Intell Inf Syst 37, 23–38 (2011). https://doi.org/10.1007/s10844-010-0135-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10844-010-0135-2