
Abstract
The design of a Ka-band gyrotron traveling wave amplifier with high power and wide bandwidth is presented in detail. The amplifier operates in the TE11 circular mode at the fundamental cyclotron harmonic. The distributed loss technique is adopted in the interaction circuit which guarantees the amplifier zero-drive stability. The effects of the parameters such as input power, driver frequency and magnetic field on the performance of the gyro-TWT are discussed. The simulation results show that the gain and the 3dB bandwidth of the designed Ka-band gyro-TWT are about 56.0dB and 1.8 GHz ,respectively. The peak output power and the corresponding electronic efficiency are about 100 kW and 23.8% respectively with the voltage 70 kV and the current 6A at the velocity ratio 1.0.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Gyrotron traveling wave(gyro-TWT) amplifiers are very attractive coherent radiation sources in millimeter-wave radars due to their capability of providing broad bandwidth and high power in the atmospheric propagation windows near 35 and 94 GHz [1–4]. However, spurious oscillations have been a major obstacle in the gyro-TWT amplifier. These oscillations include reflective oscillations due to reflections at the input–output couplers and structural nonunifomities, the absolute instability near the cutoff frequency of the operating mode, and gyrotron backward-wave- oscillations(gyro-BWOs) [5]. These three main types of oscillations in the gyro-TWT can degrade the amplifier performance. Recently, the distributed-loss circuit has been considered as effective method to suppress these oscillations [6]. Remarkable experimental progress has been made recently.
A Ka band TE11 mode gyro-TWT has been conducted at the National Tsing Hua University,Taiwan which produced 93 kW saturated peak output power at 26.5% efficiency with a 3dB bandwidth of 8.6%, and an ultrahigh gain of 70dB [5]. In the United States, a TE01 mode gyro-TWT has been developed at the Naval Research Laboratory (NRL), to provide the required loss for stable operation, the amplifier used a ceramic loaded interaction circuit. A saturated peak power of 137 kW was achieved at 34.1 GHz, a saturated gain of 47.0 dB, an efficiency of 17%, and a 3dB bandwidth of 1.11 GHz [7]. A mode-selective TE11 mode gyro-TWT has demonstrated a measured peak output power of 78 kW, gain 60 dB, and a 3-dB bandwidth of 4.2 GHz [8].
In this paper, we present the design of a TE11 mode Ka-band gyro-TWT amplifier in the Institute of Electronics, Chinese Academy of Sciences(IECAS). The remainder of the paper is organized as follows. In Section 2, the detailed design of the gyro-TWT using numerical simulations is presented. The results are summarized and conclusions are drawn in Section 3.
2 Amplifier design
The Ka-band gyro-TWT amplifier operates in the cylindrical TE11 mode at the fundamental cyclotron harmonic. In order to improve the amplifier stability, a distributed loss interaction circuit is employed. The gyro-TWT circuit consisted of an input coupler, the loaded interaction section, the unloaded interaction section, and a nonlinear output taper from which the power is extracted. The detailed design of these components is discussed in this section.
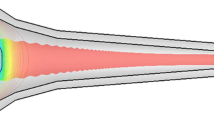
The input coupler system with broad bandwidth and high efficiency is one of the key components of a gyro-TWT amplifier. A schematic of the input coupler is shown in Fig. 1. It is composed of four components, namely, BJ-320 rectangular waveguide, a pillbox window, non-standard rectangular waveguide and a main cylindrical waveguide with a gradual waveguide transition. The input power is injected through a BJ-320 rectangular TE10 waveguide. The sapphire pillbox input window functions as vacuum sealing. The input fundamental rectangular waveguide TE10 mode is coupled to the main cylindrical waveguide through the rectangular aperture. The input coupler is designed using the High-Frequency Structure Simulator (HFSS) to operate in the TE11 mode across the band of 33.5–36 GHz. The size of rectangular aperture and gradual cylindrical waveguide transition are adjusted to provide efficient coupling of TE10 rectangular mode to the linearly polarized TE11 circular mode. Figure 2 gives the simulated model and the distributed electric field. It obviously shows the input TE10 rectangular mode converted to polarized TE11 circular mode. The curve of the transmission coefficient of the input coupling system as a function of the frequency is shown in Fig. 3. From the figure, we can see that the bandwidth of the input coupling system is about 2.0 GHz when the transmission coefficient of the input coupler is less than −1 dB.

Schematic of the input coupler structure.

The simulation model of the input coupling structure.

The transmission coefficient of the input coupling system versus the driver frequency.
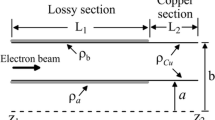
The gyro-TWT interaction circuit consists of the loaded and unloaded sections. The lossy section has been loaded with wall resistivity 36000 ρcu, where ρcu is the resistivity of copper (ρcu = 1.72 × 10−8 Ωm). The lengths of the loaded and unloaded sections of this circuit have been selected to ensure stable operation, amplifier gain and efficiency requirements. The dispersion diagram of the TE11 mode gyro-TWT interaction is shown in Fig. 4 with the beam voltage of Vb = 70 kV and velocity ratio of \( {\upsilon_\bot }/{\upsilon_z} = 1.0 \). From the dispersion relation we can see that the most critical parasitic mode for TE11 gyro-TWT amplifiers is the second harmonic TE21 mode gyro-BWO.

f-kz diagram of a fundamental harmonic gyro-TWT operating in the TE11 mode.
Figure 5 gives the spatial growth of the amplifier under three different input powers. The curve of the output power as a function of the input power with the velocity ratio 1.0 is shown in Fig. 6. From the figure, we can see that the output power increases with input power until the input power is 0.22 W. Figure 7 shows the effect of velocity spread on the output power. For an axial velocity spread of 5%, the predicted peak power is 100 kW with an efficiency of 23.8% and a bandwidth of 5.6%, as shown in Fig. 7. From the figure, we can also see that the bandwidth decreases with the velocity spread. Figure 8 gives the output power as functions of the magnetic field. From the figure, the calculated results show that the output power is very sensitive to the operating magnetic field. Downtapering the magnetic field has been shown to be effective means for efficiency enhancement. Table 1 gives the optimal design parameters for the amplifier.

Axial power growth in the loaded TE11 circuit for three values of input power.

The output power dependence on the input power.

The effect of velocity spread on output power. (a) The axial distribution for the downtapering magnetic field and loaded loss in the interaction circuit. (b) Calculated power as a function of downtapering the magnetic field(B0 is the uniform operating magnetic field, \( {B_0}/{B_g} = 0.99 \),Bg is the grazing magnetic field).

Output power versus the magnetic field.
For the electron optical system, we used a conduction-cooled superconducting magnet in the beam-wave interaction region and a triode-type magnetron injection gun (MIG) designed by using electron trajectory code EGUN. The design has been complicated both by the choice of the interaction radius and by the electron beam energy requirements. Operational tradeoff equations are used to obtain a starting point and EGUN is used to refine the design. An axial velocity spread near 5% at a velocity ratio of 1.0 is obtained in simulations. The magnetic field profile and electron beam trajectory are shown in Fig. 9. The beam-guiding center radius is 1.29 mm with a magnetic compression radio of 10. The electron beam voltage and current are 70 kV and 6 A, respectively, as listed in Table 2.

Electron trajectories, electrode profiles and magnetic field profile of the double-anode magnetron injection gun design.
3 Summary
In this paper, the design of a Ka-band gyro-TWT employing the distributed loss approach is presented. According to the self-consistent nonlinear code, the effects of the parameters such as input power, driver frequency and magnetic field on the performance of the gyro-TWT are studied in detail. The simulation results show that the gain and the 3dB bandwidth of the designed Ka-band gyro-TWT are about 56dB and 1.8 GHz (about5.6%), respectively, at the axial velocity spread near 5%. The gyro-TWT operates in the TE11 circular mode and is driven by a 70 kV, 6A, MIG electron beam with an axial velocity spread of 5%. The gyro-TWT amplifier will be constructed shortly after the stability analysis is discussed.
References
K. R. Chu, “The electron cyclotron maser,” Rev. Modern Phys. 76, 489 (2004).
K. R. Chu, “Overview of research on the gyrotron traveling wave amplifier,” IEEE Trans. on Plasma Science 30 (3), 903–908 (2002).
Q. S. Wang, H. E. Huey, D. B. McDermott et al. “Design of a W-band second -harmonic TE02 gyro-TWT amplifier,” IEEE Trans. Plasma Sci. 28 (6), 2232–2237 (2000).
H. H. Song et al. “Theory and experiment of a 94 GHz gyrotron traveling wave amplifier,” Phys. Plasmas 11, 2935 (2004).
K. R. Chu, H. Y. Chen, C. L. Hung et al. “Theory and experiment of ultra-high gain Gyrotron traveling wave amplifier,” IEEE Trans. Plasma Sci. 29, 391 (1999).
K. R. Chu, “Ultra-high gain gyrotron traveling wave amplifier,” Phys. Rev. Lett. 81 (21), 4760–4763 (1998).
M. Carven et al. “A gyrotron-traveling-wave tube amplifier with a ceramic loaded interaction region,” IEEE Trans. Plasma Sci. 30 (3), 885–893 (2002).
D. E. Pershing, K. T. Nguyen, J. P. Calame et al. “A TE11 Ka-Band Gyro-TWT Amplifier with high-average power compatible distributed loss,” IEEE Trans. Plasma Sci. 32 (3), 947–956 (2004).
Open Access
This article is distributed under the terms of the Creative Commons Attribution Noncommercial License which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This is an open access article distributed under the terms of the Creative Commons Attribution Noncommercial License (https://creativecommons.org/licenses/by-nc/2.0), which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
About this article
Cite this article
Xu, SX., Liu, PK., Zhang, SC. et al. Design and Simulation of a Ka-Band TE11 Mode Gyro-Traveling-Wave Amplifier. J Infrared Milli Terahz Waves 31, 221–227 (2010). https://doi.org/10.1007/s10762-009-9572-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10762-009-9572-9