
Abstract
This paper revisits from a nonsmooth dynamics perspective the contact process encountered in two archetypal rocking structures: the rigid rocking block and the flexible rocking oscillator. The analysis assumes impact is an instantaneous (unilateral) contact, and models the behavior along the normal direction with a set-valued Newton’s law. In the tangential direction it assumes that sliding is prevented. The study formulates both impact and uplifting phenomena as linear complementarity problems (LCPs). The proposed LCP formulation encapsulates all post-impact states and liberates from the need for additional ad-hoc assumptions. The results show that the proposed nonsmooth approach verifies the corresponding results of other studies with reference to the rigid rocking block. Focusing on the flexible rocking oscillator, the proposed model is compared with pertinent analytical, numerical and experimental results from literature. The present study offers original analytical solutions describing all physically feasible post-impact states and confirms, as a special case, existing solutions of rocking initiation. Importantly, the analysis unveils that a given rocking oscillator might choose a different post-impact state (e.g. bouncing, full contact, or immediate rocking) depending on its flexural deformation at the time of impact. Further, it shows that in the case of immediate rocking after impact, the post-impact flexural velocity of the rocking oscillator is not equal with its pre-impact value. The results also reveal the dominant role of the assumed value of the Newton’s coefficient of restitution on the response-history of the rocking oscillator.
















Similar content being viewed by others

References
Acikgoz S, DeJong MJ (2012) The interaction of elasticity and rocking in flexible structures allowed to uplift. Earthq Eng Struct Dyn 41(15):2177–2194
Acikgoz S, DeJong MJ (2014) The rocking response of large flexible structures to earthquakes. Bull Earthq Eng 12(2):875–908
Acikgoz S, DeJong MJ (2016) Analytical modelling of multi-mass flexible rocking structures. Earthq Eng Struct Dyn. doi:10.1002/eqe.2735
Andreaus U, Casini P (1999) Dynamics of three-block assemblies with unilateral deformable contacts. Part 1: contact modelling. Earthq Eng Struct Dyn 28(12):1621–1636
Augusti G, Sinopoli A (1992) Modelling the dynamics of large block structures. Meccanica 27(3):195–211
Brogliato B (1999) Nonsmooth mechanics: models, dynamics and control. Springer, Berlin
Brogliato B, Zhang H, Liu C (2012) Analysis of a generalized kinematic impact law for multibody–multicontact systems, with application to the planar rocking block and chains of balls. Multibody Sys Dyn 27(3):351–382
Chen YH, Liao WH, Lee CL, Wang YP (2006) Seismic isolation of viaduct piers by means of a rocking mechanism. Earthq Eng Struct Dyn 35(6):713–736
Chopra AK, Yim SCS (1985) Simplified earthquake analysis of structures with foundation uplift. J Struct Eng 111(4):906–930
Chopra AK et al (1995) Dynamics of structures, vol 3. Prentice Hall, Englewood Cliffs
Cottle RW, Dantzig GB (1968) Complementary pivot theory of mathematical programming. Linear Algebra Appl 1(1):103–125
DeJong MJ, Dimitrakopoulos EG (2014) Dynamically equivalent rocking structures. Earthq Eng Struct Dyn 43(10):1543–1563
Dimitrakopoulos EG (2010) Analysis of a frictional oblique impact observed in skew bridges. Nonlinear Dyn 60(4):575–595
Dimitrakopoulos EG (2011) Seismic response analysis of skew bridges with pounding deck–abutment joints. Eng Struct 33(3):813–826
Dimitrakopoulos EG, DeJong MJ (2012a) Overturning of retrofitted rocking structures under pulse-type excitations. J Eng Mech 138(8):963–972
Dimitrakopoulos EG, DeJong MJ (2012b) Revisiting the rocking block: closed-form solutions and similarity laws. Proc R Soc A 468(2144):2294–2318
Dimitrakopoulos EG, Giouvanidis AI (2015) Seismic response analysis of the planar rocking frame. J Eng Mech 141(7):04015,003
Giouvanidis AI, Dimitrakopoulos EG (2016) Seismic performance of rocking frames with flag-shaped hysteretic behavior. J Eng Mech. doi:10.1061/(ASCE)EM.1943-7889.0001206
Glocker C (2001) Set-valued force laws: dynamics of non-smooth systems, vol 1. Springer, Berlin
Housner GW (1963) The behavior of inverted pendulum structures during earthquakes. Bull Seismol Soc Am 53(2):403–417
Kalliontzis D, Sritharan S, Schultz A (2016) Improved coefficient of restitution estimation for free rocking members. J Struct Eng 142:06016002
Leine R, Van Campen D, Glocker CH (2003) Nonlinear dynamics and modeling of various wooden toys with impact and friction. J Vib Control 9(1–2):25–78
Lemke CE (1965) Bimatrix equilibrium points and mathematical programming. Manag Sci 11(7):681–689
Lipscombe P, Pellegrino S (1993) Free rocking of prismatic blocks. J Eng Mech 119(7):1387–1410
Makris N, Vassiliou MF (2012) Planar rocking response and stability analysis of an array of free-standing columns capped with a freely supported rigid beam. Earthq Eng Struct Dyn 42(3):431–449
Meek JW (1975) Effects of foundation tipping on dynamic response. J Struct Div 101(7):1297–1311
Oliveto G, Calio I, Greco A (2003) Large displacement behaviour of a structural model with foundation uplift under impulsive and earthquake excitations. Earthq Eng Struct Dyn 32(3):369–393
Pampanin S (2012) Reality-check and renewed challenges in earthquake engineering: implementing low-damage structural systems-from theory to practice. Bull N Z Soc Earthq Eng 45(4):137–160
Payr M, Glocker C (2005) Oblique frictional impact of a bar: analysis and comparison of different impact laws. Nonlinear Dyn 41(4):361–383
Pfeiffer F, Glocker C (2000) Multibody dynamics with unilateral contacts, vol 421. Springer Science & Business Media, Berlin
Priestley MN, Seible F, Calvi GM (1996) Seismic design and retrofit of bridges. Wiley, London
Prieto F, Lourenço PB, Oliveira C (2004) Impulsive Dirac-delta forces in the rocking motion. Earthq Eng Struct Dyn 33(7):839–857
Psycharis IN (1991) Effect of base uplift on dynamic response of SDOF structures. J Struct Eng 117(3):733–754
Ricker N (1943) Further developments in the wavelet theory of seismogram structure. Bull Seismol Soc Am 33(3):197–228
Ricker N (1944) Wavelet functions and their polynomials. Geophysics 9(3):314–323
Routledge PJ, Cowan MJ, Palermo A (2016) Low-damage detailing for bridges—a case study of Wigram–Magdala bridge. In: Proceedings, New Zealand society for earthquake engineering 2016 conference. Christchurch
Shenton HW III, Jones NP (1991) Base excitation of rigid bodies. I: formulation. J Eng Mech 117(10):2286–2306
Skinner R, Tyler R, Heine A, Robinson W (1980) Hysteretic dampers for the protection of structures from earthquakes. Bull N Z Natl Soc Earthq Eng 13(1):22–36
Truniger R, Vassiliou MF, Stojadinović B (2015) An analytical model of a deformable cantilever structure rocking on a rigid surface: experimental validation. Earthq Eng Struct Dyn 44(15):2795–2815
Vassiliou MF, Mackie KR, Stojadinović B (2014) Dynamic response analysis of solitary flexible rocking bodies: modeling and behavior under pulse-like ground excitation. Earthq Eng Struct Dyn 43(10):1463–1481
Vassiliou MF, Truniger R, Stojadinović B (2015) An analytical model of a deformable cantilever structure rocking on a rigid surface: development and verification. Earthq Eng Struct Dyn 44(15):2775–2794
Vassiliou MF, Mackie KR, Stojadinović B (2016) A finite element model for seismic response analysis of deformable rocking frames. Earthq Eng Struct Dyn. doi:10.1002/eqe.2799
Yilmaz C, Gharib M, Hurmuzlu Y (2009) Solving frictionless rocking block problem with multiple impacts. Proc R Soc A. doi:10.1098/rspa.2009.0273
Acknowledgements
Financial support was provided by the Research Grants Council of Hong Kong, under Grant Reference Number ECS 639613. The authors would like to thank Dr. Michalis F. Vassiliou for sharing part of the numerical and experimental results reported in Truniger et al. (2015).
Author information
Authors and Affiliations
Corresponding author
Appendix: Analytical derivation of the equations of motion
Appendix: Analytical derivation of the equations of motion
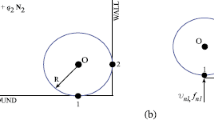
Consider a rocking oscillator (Fig. 1b) with a concentrated mass m on top, a total column mass \(m_c\) uniformly distributed along its length and a rigid base with mass \(m_b\). Assume the lumped mass m creates no moment of inertia, while the rigid base creates moment of inertia with respect to its center of mass equal to \({I_{{m_b}}} = {m_b}{\rho ^2}\), where \(\rho\) is the radius of gyration of the base. Following Vassiliou et al. (2015), Chopra et al. (1995) the shape function that describes the deformation of the column is:
where \(\xi\) is the distance measured from the base of the column (Fig. 1b). Therefore, the deformation of the column at any arbitrary point is defined as: \({u_\xi }\left( {\xi ,t} \right) = u\left( t \right) \psi \left( \xi \right)\), where \(u\left( t \right)\) denotes the generalized coordinate.
Before rocking initiates, the oscillator behaves as a generalized single degree of freedom system with generalized mass and stiffness respectively (Vassiliou et al. 2015):
After the initiation of rocking, the generalized coordinates vector for the planar rocking motion of the flexible rocking oscillator becomes: \({\mathbf{q}} = \left[ {\begin{array}{cccc} u&x&y&\phi \end{array}} \right] ^T\) (Fig. 1b). Therefore, at an arbitrary time-instant, the position of the lumped mass (\(X_m\), \(Y_m\)), any point along the column (\(X_{{m_c}}\), \(Y_{{m_c}}\)) and of the midpoint of the rigid base (\(X_{{m_b}}\), \(Y_{{m_b}}\)) become respectively (Fig. 1b):
where \(u_g\left( t\right)\) denotes the ground displacement measured from a reference point on the ground.
The equations of motion of the flexible rocking oscillator can be derived using the general form of the Lagrange’s equation:
where \(L = T - V\), with T the kinetic energy, V the potential energy and Q the generalized force. In particular, assuming positive (counter-clockwise) rotations, the kinetic energy of the system is:
The potential energy due to the gravitational forces and the strain energy of the system becomes:
Finally, the work done by the non-conservative forces gives the generalized force Q:
where \(\zeta\) is the (structural) damping ratio responsible for the energy dissipation while the structure vibrates.
After substituting Eqs. (52), (53) and (54) into Eq. (51), the equations of motion of the flexible rocking oscillator become:
Rights and permissions
About this article

Cite this article
Giouvanidis, A.I., Dimitrakopoulos, E.G. Nonsmooth dynamic analysis of sticking impacts in rocking structures. Bull Earthquake Eng 15, 2273–2304 (2017). https://doi.org/10.1007/s10518-016-0068-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-016-0068-4