
Abstract
This article introduces simple, information-feedback plans that guide a robot through an unknown obstacle course using the sensed information from a single intensity source. The framework is similar to the well-known family of bug algorithms; however, our plans require less sensing information than any others. The robot is unable to access precise information regarding position coordinates, angular coordinates, time, or odometry, but is nevertheless able to navigate itself to a goal among unknown piecewise-analytic obstacles in the plane. The only sensor providing real values is an intensity sensor, which measures the signal strength emanating from the goal. The signal intensity function may or may not be symmetric; the main requirement is that the level sets are concentric images of simple closed curves. Convergence analysis and distance bounds are established for the presented plans. Furthermore, they are experimentally demonstrated using a differential drive robot and an infrared beacon.



















Similar content being viewed by others



Notes
A technicality regarding the storage of real numbers is avoided here. Of course, real numbers may require unbounded or infinite memory; however, we imagine fixed precision representations. If desired, the theoretical bounds in this paper can be expanded to incorporate floating point precision error.
Fig. 4 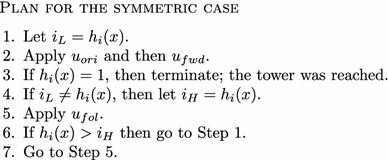
A solution plan for the case of a radially symmetric intensity function

References
Bachrach, A., He, R., & Roy, N. (2009). Autonomous flight in unknown indoor environments. International Journal of Micro Air Vehicles, 1(4), 217–228.
Baeza, R. A., Culberson, J. C., & Rawlins, G. J. E. (1993). Searching in the plane. Information and Computation, 106(2), 234–252.
Bender, M. A., Fernandez, A., Ron, D., Sahai, A., & Vadhan, S (1998). The power of a pebble: Exploring and mapping directed graphs. In Proceedings Annual Symposium on Foundations of Computer Science. Palo Alto, CA.
Blum, A., Raghavan, P., & Schieber, B. (1991). Navigating in unfamiliar geometric terrain. In Proceedings of the Twenty-Third Annual ACM Symposium on Theory of Computing: STOC ’91 (pp. 494–504). New York, NY: ACM.
Blum, M., & Kozen, D. (1978). On the power of the compass (or, why mazes are easier to search than graphs). In Proceedings of the Annual Symposium on Foundations of Computer Science (pp. 132–142).
Brunner, J., Mihalák, M., Suri, S., Vicari, E., & Widmayer, P. (2008). Simple robots in polygonal environments: A hierarchy. Algorithmic Aspects of Wireless Sensor, Networks, 5389, 111–124.
Choset, H., & Burdick, J. (2000). Sensor-based exploration: Incremental construction of the hierarchical generalized Voronoi graph. International Journal of Robotics Research, 19(2), 126–148.
Choset, H., La Civita, M., & Park, J. C. (1999). Path planning between two points for a robot experiencing localization error in known and unknown environments. In Proceedings of the International Conference on Field and Service Robotics: SR’99 (pp. 98–103).
Clarke, F. H. (1998). Optimization and nonsmooth analysis. Berlin: Springer.
Datta, A., Hipke, C. A., & Schuierer, S. (1995). Competitive searching in polygons-beyond generalized streets. In J. Staples, P. Eades, N. Katoh, & A. Moffat (Eds.), Algorithms and Computation (pp. 32–41). Berlin: Springer.
Deng, X., Kameda, T., & Papadimitriou, C. (1998). How to learn an unknown environment. I: The rectilinear case. Journal of the ACM, 45(2), 215–245.
Donald, B. R. (1988). The complexity of planar compliant motion planning under uncertainty. In Proceedings of the ACM Symposium on Computational Geometry (pp. 309–318). Paris, France.
Erdmann, M. A. (1984). On motion planning with uncertainty. Master’s thesis, Massachusetts Institute of Technology, Cambridge, MA.
Erdmann, M. A., & Mason, M. T. (1988). An exploration of sensorless manipulation. IEEE Transactions on Robotics, Automation, 4(4), 369–379.
Fekete, S. P., Klein, R., & Nüchter, A., (2004). Online searching with an autonomous robot. In Proceedings of the Workshop on Algorithmic Foundations of Robotics. Zeist, The Netherlands.
Fraigniaud, P., Ilcinkas, D., Peer, G., Pelc, A., & Peleg, D. (2005a). Graph exploration by a finite automaton. Theoretical Computer Science, 345(2–3), 331–344.
Gabriely, Y., & Rimon, E. (2008a). Cbug: A quadratically competitive mobile robot navigation algorithm. IEEE Transactions on Robotics, 24(6), 1451–1457.
Gabriely, Y., & Rimon, E. (2008b). Competitive disconnection detection in on-line mobile robot navigation. Algorithmic Foundation of Robotics VII, 47, 253–267.
Gfeller, B., Mihalak, M., Suri, S., Vicari, E., & Widmayer, P. (2007). Counting targets with mobile sensors in an unknown environment. In ALGOSENSORS. Wroclaw, Poland.
Girod, L., & Estrin, D. (2001). Robust range estimation using acoustic and multimodal sensing. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan.
Goldberg, K. Y. (1993). Orienting polygonal parts without sensors. Algorithmica, 10, 201–225.
Grasso, F. W., Consi, T. R., Mountain, D. C., & Atema, J. (2000). Biomimetic robot lobster performs chemo-orientation in turbulence using a pair of spatially separated sensors: Progress and challenges. Robotics and Autonomous Systems, 30(1), 115–131.
Han, D., Andersen, D., Kaminsky, M., Papagiannaki, K., & Seshan, S. (2009). Access point localization using local signal strength gradient. Passive and Active Network, Measurement (pp. 99–108). Seoul, South Korea.
Hashemi, H. (1993). The indoor radio propagation channel. Proceedings of the IEEE, 81(7), 943–968.
He, R. Prentice, S., & Roy,N. (2008) Planning in information space for a quadrotor helicopter in a gps-denied environments. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2008) (pp. 1814–1820). Los Angeles, CA.
Ishida, H., Kagawa, Y., Nakamoto, T., & Moriizumi, T. (1996). Odor-source localization in the clean room by an autonomous mobile sensing system. Sensors and Actuators B, 33(1–3), 115– 121.
Ishida, H., Tanaka, H., Taniguchi, H., & Moriizumi, T. (2006). Mobile robot navigation using vision and olfaction to search for a gas/odor source. Autonomous Robots, 20(3), 231–238.
Kamon, I., Rimon, E., & Rivlin, E. (1998). TangentBug: A range-sensor-based navigation algorithm. The International Journal of Robotics Research, 17(9), 934.
Kamon, I., Rimon, E., & Rivlin, E. (1999). Range-sensor based navigation in three dimensions. Proceedings of the IEEE International Conference on Robotics and Automation (p. 1).
Kamon, I., & Rivlin, E. (1997). Sensory-based motion planning with global proofs. IEEE Transactions on Robotics, Automation, 13(6), 814–822.
Katsev, M., & LaValle, S. M. (2011). Learning the Delaunay triangulation of landmarks from a distance ordering sensor. In Proceedings IEEE International Conference on Intelligent Robots and Systems.
Kim, J., Zhang, F., & Egerstedt, M. (2010). A provably complete exploration strategy by constructing Voronoi diagrams. Autonomous Robots, 29(3–4), 367–380.
Kleinberg,J. M. (1994). On-line algorithms for robot navigation and server problems. Cambridge, MA: MIT. (Technical Report MIT/LCS/TR-641).
Kowadlo, G., & Russell, R. A. (2008). Robot odor localization: A taxonomy and survey. The International Journal of Robotics Research, 27(8), 869.
Kuwana, Y., Nagasawa, S., Shimoyama, T., & Kanzaki, R. (1999). Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics, 14(2), 195–202.
Landa, Y., Tsai, R., & Cheng, L. T. (2006). Visibility of point clouds and mapping of unknown environments. In Advanced Concepts for Intelligent Vision Systems, 2006: ACIVS’06 (pp. 1014–1025).
Laubach, S. L., & Burdick, J. W. (1999a). An autonomous sensor-based path-planning for planetary microrovers. In Proceedings IEEE International Conference on Robotics & Automation. Detroit, MI.
Laubach, S. L., & Burdick, J. W. (1999b). Practical autonomous path planner for turn-of-the-century planetary microrovers. Proceedings of SPIE, 3525, 182.
Laubach, S. L., & Burdick, J. W. (1999c). RoverBug: Long Range Navigation for Mars Rovers. Lecture Notes in Control and Information Sciences (pp. 339–348).
Luenberger, D. G. (1973). Introduction to linear and nonlinear programming. New York, NY: Wiley.
Lumelsky, V. J. (2005). Sensing, intelligence, motion: How robots and humans move in an unstructured world. Hoboken, NJ: Wiley.
Lumelsky, V. J., & Skewis, T. (1988). A paradigm for incorporating vision in the robot navigation function. In Proceedings IEEE International Conference on Robotics Automation (pp. 734–739).
Lumelsky, V. J., & Stepanov, A. A. (1987). Path planning strategies for a point mobile automaton moving amidst unknown obstacles of arbitrary shape. Algorithmica, 2, 403–430.
Martinson, E., & Arkin, R. C. (2004). Noise maps for acoustically sensitive navigation. Proceedings of SPIE, 5609, 50–60.
Martinson, E., & Schultz, A. (2007). Robotic discovery of the auditory scene. In IEEE International Conference on Robotics and Automation 2007 (pp. 435–440).
Murphy, L., & Newman, P. (2008). Using incomplete online metric maps for topological exploration with the gap navigation tree. In IEEE International Conference on Robotics and Automation. (pp. 2792–2797).
Nakadai, K., Hidai, K., Okuno, H.G., & Kitano, H. (2001). Epipolar geometry based sound localization and extraction for humanoid audition. In Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Maui, Hawaii.
Nakadai, K. Matsuura, D., Okuno, H.G., & Kitano, H. (2003). Applying scattering theory to robot audition system: Robust sound source localization and extraction. In Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 1147–1152). Citeseer.
Rajko, S., & LaValle, S. M. (2001). A pursuit-evasion bug algorithm. In Proceedings IEEE International Conference on Robotics and Automation (pp. 1954–1960).
Ramo, S., Whinnery, J. R., & Van Duzer, T. (2009). Fields and waves in communication electronics. New Delhi: Wiley.
Russell, R. A. (2003). Chemical source location and the robomole project. In Proceedings of the Australasian Conference on Robotics and Automation. Citeseer.
Russell, R. A. (2004). Robotic location of underground chemical sources. Robotica, 22(01), 109–115.
Suri, S., Vicari, E., & Widmayer, P. (2008). Simple robots with minimal sensing: From local visibility to global geometry. The International Journal of Robotics Research, 27(9), 1055.
Taylor, K., & LaValle, S. M. (2009). I-Bug: An intensity-based bug algorithm. In Proceedings IEEE International Conference on Robotics and Automation.
Tekdas, O. Karnad, N., & Isler, V. (2009). Efficient strategies for collecting data from wireless sensor network nodes using mobile robots. In 14th International Symposium on Robotics Research: ISRR 2009.
Thrun, S., Burgard, W., & Fox, D. (2005). Probabilistic Robotics. Cambridge, MA: MIT.
Thrun, S. Hahnel, D. Ferguson, D. Montemerlo, M., Triebel, R., Burgard, W., Baker, C., Omohundro, Z., Thayer, S., & W. Whittaker (2003). A system for volumetric robotic mapping of abandoned minesh. In IEEE International Conference on Robotics and Automation (Vol. 3, pp. 4270–4275). Citeseer.
Tovar, B., Murrieta-Cid, R., & LaValle, S. M. (2007). Distance-optimal navigation in an unknown environment without sensing distances. IEEE Transactions on Robotics, 23(3), 506–518.
Yershova, A., Tovar, B., Katsev, M., Ghrist, R., & LaValle, S.M. (2010). Mapping and pursuit-evasion strategies for a simple wall-following robot. IEEE Transactions on Robotics (under review).
Acknowledgments
This work was supported in part by the DARPA SToMP Program (DSO HR0011-07-1-002), NSF Grant 0904501 (IIS Robotics), NSF Grant 1035345 (Cyberphysical Systems), and MURI/ONR Grant N00014-09-1-1052. We thank Stephen Bond for helpful discussions.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Taylor, K., LaValle, S.M. Intensity-based navigation with global guarantees. Auton Robot 36, 349–364 (2014). https://doi.org/10.1007/s10514-013-9356-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-013-9356-x