
Abstract
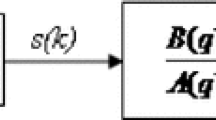
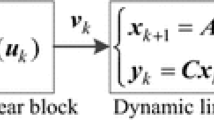
This paper describes a computationally efficient nonlinear Model Predictive Control (MPC) algorithm in which the neural Hammerstein model is used. The Multiple-Input Multiple-Output (MIMO) dynamic model contains a neural steady-state nonlinear part in series with a linear dynamic part. The model is linearized on-line, as a result the MPC algorithm requires solving a quadratic programming problem, the necessity of nonlinear optimization is avoided. A neutralization process is considered to discuss properties of neural Hammerstein models and to show advantages of the described MPC algorithm. In practice, the algorithm gives control performance similar to that obtained in nonlinear MPC, which hinges on non-convex optimization.
Similar content being viewed by others

References
Abonyi J, Babuška J, Ayala Botto M, Szeifert F, Nagy L (2000) Identification and control of nonlinear systems using fuzzy Hammerstein models. Ind Eng Chem Res 39:4302–4314
Al-Duwaish H, Karim MN, Chandrasekar V (1997) Hammerstein model identification by multilayer feedforward neural networks. Int J Syst Sci 28:49–54
Aoubi M (1998) Comparison between the dynamic multi-layered perceptron and generalised Hammerstein model for experimental identification of the loading process in diesel engines. Control Eng Pract 6:271–279
Åkesson BM, Toivonen HT (2006) A neural network model predictive controller. J Process Control 16:937–946
Bazaraa MS, Sherali J, Shetty K (1999) Nonlinear programming: theory and algorithms. Prentice Hall, New York
Billings SA, Fakhouri SY (1982) Identification of systems containing linear dynamic and static nonlinear elements. Automatica 18:15–26
Chan KH, Bao J (2007) Model predictive control of Hammerstein systems with multivariable nonlinearities. Ind Eng Chem Res 46:168–180
Chang FH, Luus R (1971) A noniterative method of identification using Hammerstein model. IEEE Trans Autom Control 16:464–468
Chen J, Huang TC (2004) Applying neural networks to on-line updated PID controllers for nonlinear process control. J Proc Control 14:211–230
Ej Dempsey, Westwick DT (2004) Identification of Hammerstein models with cubic spline nonlinearities. IEEE Trans Biomed Eng 51:237–245
Dougherty D, Cooper D (2003) A practical multiple model adaptive strategy for single-loop MPC. Control Eng Pract 11:141–159
Eskinat E, Johnson S, Luyben WL (1991) Use of Hammerstein models in identification of nonlinear systems. AIChE J 37:255–268
Fruzzetti KP, Palazoğlu A, McDonald KA (1997) Nonlinear model predictive control using Hammerstein models. J Proc Control 7:31–41
Goethals I, Pelckmans K, Suykens JAK, De Moor B (2005) Identification of MIMO Hammerstein models using least squares support vector machines. Automatica 41:1263–1272
Greblicki W (1989) Non-parametric orthogonal series identification Hammerstein systems. Int J Syst Sci 20:2355–2367
Gustafsson T, Waller K (1992) Nonlinear and adaptive control of pH. Ind Eng Chem Res 31:2681–2693
Harnischmacher G, Marquardt W (2007) Nonlinear model predictive control of multivariable processes using block-structured models. Control Eng Pract 15:1238–1256
Haykin S (1999) Neural networks—a comprehensive foundation. Prentice Hall, Englewood Cliffs
Henson MA (1998) Nonlinear model predictive control: current status and future directions. Comput Chem Eng 23:187–202
Henson MA, Seborg DE (1994) Adaptive nonlinear control of a pH neutralization process. IEEE Trans Control Syst Technol 2:169–182
Hornik K, Stinchcombe M, White H (1989) Multilayer feedforward networks are universal approximators. Neural Netw 2:359–366
Hu Q, Saha P, Rangaiah GP (2000) Experimental evaluation of an augmented IMC for nonlinear systems. Control Eng Pract 8:1167–1176
Hussain MA (1999) Review of the applications of neural networks in chemical process control—simulation and online implementation. Artif Intell Eng 13:55–68
Ingram A, Matthew A, Franchek A, Balakrishnan V, Surnilla G (2005) Robust SISO H∞ controller design for nonlinear systems. Control Eng Pract 13:1413–1423
Janczak A (2004) Identification of nonlinear systems using neural networks and polynomial models: block oriented approach. Springer, London
Knohl T, Xu WM, Unbehauen H (2003) Indirect adaptive dual control for Hammerstein systems using ANN. Control Eng Pract 11:377–385
Lakshminarayanan S, Shah SL, Nandakumar K (1995) Identification of Hammerstein models using multivariate statistical tools. Chem Eng Sci 50:3599–3613
Ling WM, Rivera D (1998) Nonlinear black-box identification of distillation column models—design variable selection for model performance enhancement. Int J Appl Math Comput Sci 8:793–813
Loh AP, De DS, Krishnaswamy PR (2004) pH and level controller for a pH neutralization process. Ind Eng Chem Res 40:3579–3584
Lu Y, Arkun Y, Palazoğlu A (2004) Real-time application of scheduling quasi-min-max model predictive control to a bench-scale neutralization reactor. Ind Eng Chem Res 43:2730–2735
Ławryńczuk M (2008) Suboptimal nonlinear predictive control with MIMO neural Hammerstein models. In: Nguyen NT, Borzemski L, Grzech A, Ali M (eds) Proceedings of the 21th international conference on industrial, engineering & other applications of applied intelligent systems, IEA-AIE 2008, Wrocław, Poland. New frontiers in applied artificial intelligence. Lecture notes in artificial intelligence, vol 5027, pp 225–234
Ławryńczuk M (2007) A family of model predictive control algorithms with artificial neural networks. Int J Appl Math Comput Sci 17:217–232
Ławryńczuk M, Marusak P, Tatjewski P (2007) Economic efficacy of multilayer constrained predictive control structures: an application to a MIMO neutralisation reactor. In: Proceedings of the 11th IFAC/IFORS/IMACS/IFIP symposium on large scale systems: theory and applications, Gdańsk, Poland, CD-ROM, paper no 93
Maciejowski JM (2002) Predictive control with constraints. Prentice Hall, Harlow
Marusak P (2009) Advantages of an easy to design fuzzy predictive algorithm in control systems of nonlinear chemical reactors. Appl Soft Comput 9:1111–1125
Narendra KS, Gallman PG (1966) An iterative method for the identification of the nonlinear systems using the Hammerstein model. IEEE Trans Autom Control 12:546–550
Nešić D, Mareels IMY (1998) Dead-beat control of a simple Hammerstein models. IEEE Trans Autom Control 43:1184–1188
Nørgaard M, Ravn O, Poulsen NK, Hansen LK (2000) Neural networks for modelling and control of dynamic systems. Springer, London
Patwardhan RS, Lakshminarayanan S, Shah SL (1998) Constrained nonlinear MPC using Hammerstein and Wiener models. AIChE J 44:1611–1622
Piche S, Sayyar-Rodsari B, Johnson D, Gerules M (2000) Nonlinear model predictive control using neural networks. IEEE Control Syst Mag 20:56–62
Qin SJ, Badgwell TA (2003) A survey of industrial model predictive control technology. Control Eng Pract 11:733–764
Ripley BD (1996) Pattern recognition and neural networks. Cambridge University Press, Cambridge
Rossiter JA (2003) Model-based predictive control. CRC Press, Boca Raton
Scattolini R, Bittanti S (1990) On the choice of the horizon in long-range predictive control—some simple criteria. Automatica 26:915–917
Smith JG, Kamat S, Madhavan KP (2007) Modeling of pH process using wavenet based Hammerstein model. J Proc Control 17:551–561
Tatjewski P (2007) Advanced control of industrial processes, Structures and algorithms. Springer, London
Yu DL, Gomm JB (2003) Implementation of neural network predictive control to a multivariable chemical reactor. Control Eng Pract 11:1315–1323
Vörö J (1997) Parameter identification of discontinuous Hammerstein systems. Automatica 33:1141–1146
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by Polish national budget funds for science for years 2009–2011 in the framework of a research project.
Rights and permissions
About this article
Cite this article
Ławryńczuk, M. Suboptimal nonlinear predictive control based on multivariable neural Hammerstein models. Appl Intell 32, 173–192 (2010). https://doi.org/10.1007/s10489-010-0211-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10489-010-0211-x