
Abstract
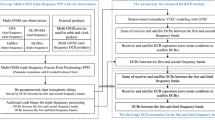
The current satellite clock products are computed using the ionosphere-free phase (L1/L2) and code (P1/P2) observations. Thus, if users conduct undifferenced positioning using these clock products together with C1 and P2 observations, the differential code bias (DCB) (C1–P1) should be properly compensated. The influence of DCB (C1–P1) on the undifferenced ambiguity solutions is investigated. Based on the investigation, we propose a new DCB (C1–P1) estimation method. Using it, the satellite DCB (C1–P1) can be computed. A 30-day (DOY 205–234, 2012) dual-frequency GPS data set is processed to estimate the DCB (C1–P1). Comparing the estimated results with that of IGS DCB products, the accuracy is better than 0.13 m. The performances of DCB (C1–P1) in the code-based single-point positioning, precise point positioning (PPP) convergence and wide-lane uncalibrated phase delay (UPD) estimation are investigated using the estimated DCB (C1–P1). The results of the code-based single-point positioning show that the influence of DCB (C1–P1) on the up direction is more evident than on the horizontal directions. The accuracy is improved by 50 % and reaches to decimeter level with DCB (C1–P1) application. The performance of DCB (C1–P1) in PPP shows that it can accelerate PPP convergence through improving the accuracy of the code observation. The computed UPD values show that influence of DCB (C1–P1) on UPD of each satellite is different, and some values are larger than 0.3 cycles.




Similar content being viewed by others

References
Banville S, Collins P, Lahaye F (2013) GLONASS ambiguity resolution of mixed receiver types without external calibration. GPS Solut 17(3):275–282
Bree R, Tiberius C (2012) Real-time single-frequency precise point positioning: accuracy assessment. GPS Solut 16:259–266
Collins P (2008) Isolating and estimating undifferenced GPS integer ambiguities. Proc ION-NTM-2008. Institute of Navigation, San Diego, pp 720–732
Dow J, Neilan R, Rizos C (2009) The International GNSS Service in a changing landscape of global navigation satellite systems. J Geod 83(3–4):191–198
Gao Y, Lahaye F, Liao X, Heroux P, Beck N, Olynik M (2001) Modeling and estimation of C1-P1 bias in GPS receivers. J Geod 74:621–626
Ge M, Gendt G, Rothacher M, Shi C, Liu J (2008) Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J Geod 82(7):389–399
Geng J, Meng X, Dodson AH, Teferle FN (2010) Integer ambiguity resolution in precise point positioning: method comparison. J Geod 84:569–581
Goodwin G, Breed A (2001) Total electron content in Australia corrected for receiver/satellite bias and compared with IRI and PIM predictions. Adv Space Res 27(1):49–60
Hatch Ron (1982) The synergism of GPS code and carrier measurements. In: Proceedings of the third international symposium on satellite Doppler positioning at Physical Sciences Laboratory of New Mexico State University, Vol. 2, Feb. 8–12, pp 1213–1231
Hauschild A, Montenbruck O (2009) Kalman-filter-based GPS clock estimation for near real-time Positioning. GPS Solut 13:173–182
Laurichesse D, Mercier F, Berthias JP, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navigation 56(2):135–149
Li B, Shen Y, Xu P (2008) Assessment of stochastic models for GPS measurements with different types of receivers. Chin Sci Bull 53(20):3219–3225
Li H, Zhou X, Wu B (2013a) Fast estimation and analysis of the inter-frequency clock bias for block IIF satellites. GPS Solut 17(3):347–355
Li H, Chen Y, Wu B, Hu X, He F, Tang G, Gong X (2013b) Modeling and initial assessment of the inter-frequency clock bias for COMPASS GEO satellites. Adv Space Res 51(12):2277–2284
Montenbruck O, Hugentobler U, Dach R, Steigenberger P, Hauschild A (2012) Apparent clock variations of the Block IIF-1 (SVN62) GPS satellite. GPS Solut 16:303–313
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Teunissen P, Nakamura S (2013) Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut 17(2):211–222
Moulborne WG (1985) The case for ranging in GPS-based geodetic systems. In: Proceedings first international symposium on precise positioning with the global positioning system, Rockville, 15–19 April, pp 373–386
Otsuka Y, Ogawa T, Saito A, Tsugawa T, Fukao S, Miyazaki S (2002) A new technique for mapping of total electron content using GPS network in Japan. Earth Planets Space 54:63–70
Sardon E, Ruis A, Zarraoa N (1994) Estimation of the transmitter and receiver differential biases and the ionospheric total electron content from global positioning system observations. Radio Sci 29(3):577–586
Seepersad G, Bisnath S (2014) Reduction of PPP convergence period through pseudorange multipath and noise mitigation. DOI, GPS Solut. doi:10.1007/s10291-014-0395-3
Tang L, Zhang X, Lv C, Gao P (2011) Estimate of GPS P1-C1 DCB with PPP and the analysis of its stability. GPS world China 36(2):1–5
Teunissen PJG, Odijk D, Zhang B (2010) PPP-RTK: results of CORS network-based PPP with integer ambiguity resolution. J Aeronaut Astronaut Aviat Ser A 42(4):223–230
Wang J, Stewart M, Tsakiri M (1998) Stochastic modeling for static GPS baseline data processing. J Surv Eng 124(4):171–181
Wang J, Satirapod C, Rizos C (2002) Stochastic assessment of GPS carrier phase measurements for precise static relative positioning. J Geod 76(2):95–104
Wübbena G (1985) Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In: Proceedings of first international symposium on precise positioning with the global positioning system, Rockville, 15–19 April, pp 403–412
Zhang X, Li X, Guo F (2011) Satellite clock estimation at 1 Hz for realtime kinematic PPP applications. GPS Solut 15:315–324
Zhang X, Li P, Guo F (2013) Ambiguity resolution in precise point positioning with hourly data for global single receiver. Adv Space Res 51(1):153–161
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Acknowledgments
This research is supported by the National Natural Science Foundation of China (41204034, 41174008, 41374031 and 41174023), the State Key Laboratory of Geo-information Engineering (SKLGIE2013-M-2-2), the Key Laboratory of Geo-informatics of State Bureau of Surveying and Mapping (201306) and the National ‘‘863 Program’’ of China (Grant No: 2013AA122501). Some data used in the paper were downloaded from the IGS and EUREF, which is acknowledged.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Li, H., Xu, T., Li, B. et al. A new differential code bias (C1–P1) estimation method and its performance evaluation. GPS Solut 20, 321–329 (2016). https://doi.org/10.1007/s10291-015-0438-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-015-0438-4