
Abstract
The nonlinear effect of the summer southeast wind and density on the 3D structures of the full Lagrangian residual velocity (LRV) was quantified for a generally nonlinear system, using Jiaozhou Bay (JZB), China as the test site. In the tidally energetic JZB, the basic patterns of the wind- and density-driven full LRVs were found to be consistent with semi-analytical solutions but highly dependent on initial times. The wind-driven full LRVs at different tidal phases flowed similarly downwind over shoals and upwind in the deep region; however, the main branches could migrate across nearly half of the bay. A density-driven, clockwise flow was dominant in the western inner bay at low tide, but it almost disappeared at high tide. The effect of density generally enhanced the outward flow in the surface layer and inward flow in the bottom layer. Along-trajectory integrated momentum balances indicated that viscosity was the main factor responsible for the time dependence of the wind-driven full LRVs, while viscosity, barotropic and baroclinic pressure gradients were the main drivers of the intra-tidal variations in the density-driven full LRVs. Generally, the summer wind and density had opposing effects, although their influence was weaker than that of the tide and could not change the patterns of the tide-driven full LRVs. When analysing the effects of wind and density on the coastal circulation in JZB, both the 3D structures and the possibility of a high initial tidal phase dependency should be considered.


















Similar content being viewed by others

Change history
10 April 2021
A Correction to this paper has been published: https://doi.org/10.1007/s10236-021-01459-8
References
Burchard H, Hetland RD (2010) Quantifying the contributions of tidal straining and gravitational circulation to residual circulation in periodically stratified tidal estuaries. J Phys Oceanogr 40:1243–1262. https://doi.org/10.1175/2010JPO4270.1
Cai ZY, Liu Z, Guo XY, Gao HW, Wang Q (2014) Influences of intratidal variations in density field on the subtidal currents: implication from a synchronized observation by multiships and a diagnostic calculation. J Geophys Res 119(3):2017–2033. https://doi.org/10.1002/2013JC009262
Chen DX (1992) Marine Atlas of Bohai Sea, Yellow Sea, East China Sea: Hydrology. China Ocean Press, Beijing (in Chinese)
Chen ZS, Wang WH, Wu SY (2007) China Bay Introduction. Ocean Press, Beijing, pp 1–583 (in Chinese with English Abstract)
Chen Y, Jiang WX, Chen X, Wang T, Bian CW (2017) Laboratory experiment on the 3D tide-induced Lagrangian residual current using the PIV technique. Ocean Dyn 67(12):1567–1576. https://doi.org/10.1007/s10236-017-1108-6
Chen Y, Cui YX, Sheng XX, Jiang WS, Feng SZ (2020) Analytical solution to the 3D tide-induced Lagrangian residual current in a narrow bay with vertically varying eddy viscosity coefficient. Ocean Dyn 67(12):1–12. https://doi.org/10.1007/s10236-020-01359-3
Cheng RT, Casulli V (1982) On Lagrangian residual currents with applications in south San Francisco Bay, California. Water Resour Res 18(6):1652–1662. https://doi.org/10.1029/WR018i006p01652
Conroy T, Sutherland DA, Ralston DK (2020) Estuarine exchange flow variability in a seasonal, segmented estuary. J Phys Oceanogr 50:595–613. https://doi.org/10.1175/JPO-D-19-0108.1
Csanady GT (1982) Circulation in the Coastal Ocean. D. Reidel, 279 pp
Cui YX, Jiang WS, Deng FJ (2018) 3D numerical computation of the tidally induced Lagrangian residual current in an idealized bay. Ocean Dyn 18(8):1–18. https://doi.org/10.1007/s10236-018-01243-1
Cui YX, Jiang WS, Zhang JH (2019) Improved numerical computing method for the 3D tidally induced Lagrangian residual current and its application in a model bay with a longitudinal topography. J Ocean Univ China 18(6):1235–1246. https://doi.org/10.1007/s11802-019-4216-8
Delhez EJM (1996) On the residual advection of passive constituents. J Mar Syst 8(3-4):147–169. https://doi.org/10.1016/0924-7963(96)00004-8
Deng FJ, Jiang WS, Feng SZ (2017) The nonlinear effects of the eddy viscosity and the bottom friction on the Lagrangian residual velocity in a narrow model bay. Ocean Dyn 67(9):1105–1118. https://doi.org/10.1007/s10236-017-1076-x
Deng FJ, Jiang WS, Valle-Levinson A, Feng SZ (2019) 3D modal solution for tidally induced Lagrangian residual velocity with variations in eddy viscosity and bathymetry in a narrow model bay. J Ocean Univ China 18(1):69–79. https://doi.org/10.1007/s11802-019-3773-1
Ding WL (1992) Tides and tidal currents. In: Liu RY (ed) Ecology and Living Resources of Jiaozhou Bay. Science Press, Beijing, pp 39–57 (in Chinese)
Editorial Board of Annals in China (1993) Jiaozhou Bay Annals of bays in China. Ocean Press, Beijing (in Chinese)
Egbert GD, Erofeeva SY (2002) Efficient inverse modeling of barotropic ocean tides. J Atmos Ocean Technol 19(2):183–204
Egbert GD, Bennett AF, Foreman MGG (1995) TOPEX/Poseidon tides estimated using a global inverse model. J. Geophys. Res. Oceans 99(C12):24821–24852
Fairall CW, Bradley EF, Rogers DP, Edson JB, Young GS (1996) Bulk parameterization of air-sea fluxes for Tropical Ocean- Global Atmosphere Coupled-Ocean Atmosphere Response Experiment. J Geophys Res 101(C2):3747–3764
Fairall CW, Bradley EF, Hare JE, Grachev AA, Edson JB (2003) Bulk parameterization of air sea fluxes: updates and verification for the COARE Algorithm. J Clim 16(4):571–591
Feng SZ (1990) On the Lagrangian residual velocity and the mass-transport in a multi- frequency oscillatory system. In: Cheng RT (ed) Residual currents and long-term transport, coastal and estuarine studies. Springer, Berlin, pp 34–48. https://doi.org/10.1007/978-1-4613-9061-9_4
Feng SZ, Cheng RT, Xi PG (1986) On tide-induced lagrangian residual current and residual transport: 1. Lagrangian residual current. Water Resour Res 22(12):1623–1634. https://doi.org/10.1029/WR022i012p01623
Feng SZ, Ju L, Jiang WS (2008) A Lagrangian mean theory on coastal sea circulation with inter-tidal transports I. Fundamentals Acta Oceanol Sin 27(6):1–16. https://doi.org/10.3969/j.issn.0253-505X.2008.06.001
Fung IY, Harrison DE, Lacis AA (1984) On the variability of the net longwave radiation at the ocean surface. Rev Geophys Space Phys 22:177–193
Garvine RW (1985) A simple model of estuarine subtidal fluctuations forced by local and remote wind stress. J Geophys Res 90(C6):11945–11948. https://doi.org/10.1029/JC090iC06p11945
Garvine RW (1995) A dynamical system for classifying buoyant coastal discharges. Cont Shelf Res 15(13):1585–1596. https://doi.org/10.1016/0278-4343(94)00065-U
Geyer WR (1997) Influence of wind on dynamics and flushing of shallow estuaries. Estuar Coast Shelf Sci 44(6):713–722. https://doi.org/10.1006/ecss.1996.0140
Geyer WR, MacCready P (2014) The estuarine circulation. Annu Rev Fluid Mech 46:175–197. https://doi.org/10.1146/annurev-fluid-010313-141302
Gong WP, Shen J, Hong B (2009) The influence of wind on the water age in the tidal Rappahannock River. Mar Environ Res 68(4):203–216. https://doi.org/10.1016/j.marenvres.2009.06.008
Guo XY, Valle-Levinson A (2008) Wind effects on the lateral structure of density-driven circulation in Chesapeake Bay. Cont Shelf Res 28(17):2450–2471. https://doi.org/10.1016/j.csr.2008.06.008
Ianniello JP (1977) Tidally induced residual currents in estuaries of constant breadth and depth. J Mar Res 35:755–786
Janzen CD, Wong KC (2002) Wind-forced dynamics at the estuary-shelf interface of a large coastal plain estuary. J Geophys Res 107:3138. https://doi.org/10.1029/2001JC000959
Jia P, Li M (2012) Dynamics of wind-driven circulation in a shallow lagoon with strong horizontal density gradient. J Geophys Res 117:C05013. https://doi.org/10.1029/2011JC007475
Jiang WS, Feng SZ (2011) Analytical solution for the tidally induced Lagrangian residual current in a narrow bay. Ocean Dyn 61(4):543–558. https://doi.org/10.1007/s10236-011-0381-z
Jiang WS, Feng SZ (2014) 3D analytical solution to the tidally induced Lagrangian residual current equations in a narrow bay. Ocean Dyn 64(8):1073–1091. https://doi.org/10.1007/s10236-014-0738-1
Jiang DJ, Wang XL (2013) Variation of runoff volume in the Dagu River Basin in the Jiaodong Peninsula. Arid Zone Res 30(6):965–972 (in Chinese, with English abstract)
Ju L, Jiang WS, Feng SZ (2009) A Lagrangian mean theory on coastal sea circulation with inter-tidal transports II. Numerical Experiments. Acta Oceanol Sin 28(1):1–14
Juarez B, Valle-Levinson A, Chant R, Li M (2019) Observations of the lateral structure of wind-driven flow in a coastal plain estuary. Estuar., Coast. Shelf S 217:262–270. https://doi.org/10.1016/j.ecss.2018.11.018
Kasai A, Hill AE, Fujiwara T, Simpson JH (2000) Effect of the Earth’s rotation on the circulation in regions of freshwater influence. J Geophys Res 105(C7):16961–16969. https://doi.org/10.1029/2000JC900058
Klingbeil K, Becherer J, Schulz E, de Swart HE, Schuttelaars HM, Valle-Levinson A, Burchard H (2019) Thickness-weighted averaging in tidal estuaries and the vertical distribution of the Eulerian residual transport. J Phys Oceanogr 49(7):1809–1826. https://doi.org/10.1175/JPO-D-18-0083.1
Lange X, Burchard H (2019) The relative importance of wind straining and gravitational forcing in driving exchange flows in tidally energetic estuaries. J Phys Oceanogr JPO–D–18–0014.1–42. https://doi.org/10.1175/JPO-D-18-0014.1
Li Y, Li M (2011) Effects of winds on stratification and circulation in a partially mixed estuary. J Geophys Res 116:C12012. https://doi.org/10.1029/2010JC006893
Liu Z, Wei H, Liu GS, Zhang J (2004) Simulation of water exchange in Jiaozhou Bay by average residence time approach. Estuar, Coast Shelf S 61:25–35. https://doi.org/10.1016/j.ecss.2004.04.009
Liu GL, Liu Z, Gao HW, Gao ZX, Feng SZ (2012) Simulation of the Lagrangian tide-induced residual velocity in a tide-dominated coastal system: a case study of Jiaozhou Bay, China. Ocean Dyn 62(10):1443–1456. https://doi.org/10.1007/s10236-012-0577-x
Liu GL, Liu Z, Gao HW (2013) Analysis of intra-tidal variation of sea temperature in Jiaozhou Bay in summer based on synchronous observation. Period Ocean Univ China 4:85–93 (in Chinese, with English abstract)
Mellor GL (2004) The basic equations. In: Mellor GL(ed) Users guide for a three-dimensional, primitive equation, numerical ocean model. Program in Atmos. and Oceanic Sci., Princeton Univ., Princeton, pp 8-10
Mellor GL, Yamada T (1982) Development of a turbulence closure model for geophysical fluid problems. Rev Geophys 20(4):851–875
Monismith S (1986) An experimental study of the upwelling response of stratified reservoirs to surface shear stress. J Fluid Mech 171:407–439. https://doi.org/10.1017/S0022112086001507
Muller H, Blanke B, Dumas F, Lekien F, Mariette V (2009) Estimating the Lagrangian residual circulation in the Iroise Sea. J Mar Syst 78(Supplement):S17–S36. https://doi.org/10.1016/j.jmarsys.2009.01.008
Muller H, Blanke B, Dumas F, Mariette V (2010) Identification of typical scenarios for the surface Lagrangian residual circulation in the Iroise Sea. J Geophys Res 115:C07008. https://doi.org/10.1029/2009JC005834
Narváez DA, Valle-Levinson A (2008) Transverse structure of wind-driven flow at the entrance to an estuary: Nansemond River. J Geophys Res 113:C09004. https://doi.org/10.1029/2008JC004770
Paulson CA, Simpson JJ (1977) Irradiance measurements in the upper ocean. J Phys Oceanogr 7:953–956
Pritchard DW (1952) Salinity distribution and circulation in the Chesapeake Bay estuarine system. J Mar Res 11:106–123
Quan Q, Mao XY, Jiang WS (2014) Numerical computation of the tidally induced Lagrangian residual current in a model bay. Ocean Dyn 64(4):471–486. https://doi.org/10.1007/s10236-014-0696-7
Reyes-Hernández C, Valle-Levinson A (2010) Wind modifications to density-driven flows in semienclosed, rotating basins. J Phys Oceanogr 40:1473–1487. https://doi.org/10.1175/2010JPO4230.1
Rodríguez PA, Carbajal N, Rodríguez JHG (2017) Lagrangian trajectories, residual currents and rectification process in the Northern Gulf of California. Estuar, Coast Shelf S 194:263–275. https://doi.org/10.1016/j.ecss.2017.06.019
Sanay R, Valle-Levinson A (2005) Wind-induced circulation in semienclosed homogeneous, rotating basins. J Phys Oceanogr 35(12):2520–2531. https://doi.org/10.1175/JPO2831.1
Smagorinsky J, Manabe S, Holloway JL Jr (1965) Numerical results from a nine-level general circulation model of the atmosphere. Mon Weather Rev 93(12):727–768
Valle-Levinson A (2008) Density-driven exchange flow in terms of the Kelvin and Ekman numbers. J Geophys Res 113:C04001. https://doi.org/10.1029/2007JC004144
Valle-Levinson A, Wong KC, Bosley KT (2001) Observations of the wind-induced exchange at the entrance to Chesapeake Bay. J Mar Rea 59(3):391–416. https://doi.org/10.1357/002224001762842253
Valle-Levinson A, Reyes C, Sanay R (2003) Effects of bathymetry, friction, and rotation on estuary-ocean exchange. J Phys Oceanogr 33:2375–2393. https://doi.org/10.1175/1520-0485(2003)033<2375:EOBFAR>2.0.CO;2
Wang Q, Gao HW (2003) Study on wind stress and air-sea exchange over coastal waters of Qingdao. Adv Mar Sci 21(1):12–20 (in Chinese, with English abstract)
Wang H, Su ZQ, Feng SZ, Sun WX (1993) A three-dimensional numerical calculation of the wind-driven thermohaline and tide-induced Lagrangian residual current in the Bohai Sea. Acta Oceanol Sin 12(2):169–182
Wang T, Jiang WS, Chen X, Feng SZ (2013) Acquisition of the tide-induced Lagrangian residual current field by the PIV technique in the laboratory. Ocean Dyn 63(11):1181–1188. https://doi.org/10.1007/s10236-013-0654-9
Winant CD (2004) Three-dimensional wind-driven flow in an elongated, rotating basin. J Phys Oceanogr 34:462–476. https://doi.org/10.1175/1520-0485(2004)034<0462:TWFIAE>2.0.CO;2
Winant CD (2008) Three-dimensional residual tidal circulation in an elongated, rotating basin. J Phys Oceanogr 38(6):1278–1295. https://doi.org/10.1175/2007JPO3819.1
Wong KC (1994) On the nature of transverse variability in a coastal plain estuary. J Geophys Res 99(C7):14209–14222. https://doi.org/10.1029/94JC00861
Xu P, Mao XY, Jiang WS (2016) Mapping tidal residual circulations in the outer Xiangshan Bay using a numerical model. J Mar Syst 44(3):181–191. https://doi.org/10.1016/j.jmarsys.2015.10.002
Zimmerman JTF (1979) On the Euler–Lagrange transformation and the Stokes’ drift in the presence of oscillatory and residual currents. Deep-Sea Res 26A:505–520. https://doi.org/10.1016/0198-0149(79)90093-1
Acknowledgments
We are grateful for the comments of two anonymous reviewers.
Funding
This study was financially supported by the Special Fund for Public Welfare Industry (Oceanography; grant No. 200805011). Dr. Guangliang Liu thanks the Youth Foundation of the Shandong Academy of Sciences (grant No. 2019QN0026).
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible Editor: Fanghua Xu
The original online version of this article was revised: The first sentence of the Abstract should read “The nonlinear effect of the summer southeast wind and density on the 3D structures of the full Lagrangian residual velocity (LRV) was quantified for a generally nonlinear system, using Jiaozhou Bay (JZB), China as the test site”.
Appendices
Appendix 1. Definitions of residual velocities and their interrelations
A full LRV \( \left({\overset{\rightharpoonup }{u}}_L\right) \) is defined as the net replacement per tidal cycle (Zimmerman 1979; Feng et al. 2008) and can be calculated as shown in Eq. (7):
where \( {\overset{\rightharpoonup }{u}}_L\left({\overset{\rightharpoonup }{x}}_0,{t}_0\right) \) represents the full LRV with the initial position vector (\( {\overset{\rightharpoonup }{x}}_0 \)) and the initial intra-tidal process-independent time (t0) for an arbitrary water parcel to be tracked; \( {\overset{\rightharpoonup }{\xi}}_{nT} \) denotes the net displacement of an arbitrarily labelled water parcel over n tidal periods, T; \( \overset{\rightharpoonup }{\xi}\left(t;{\overset{\rightharpoonup }{x}}_0,{t}_0\right)={\int}_{t_0}^t\left(\overset{\rightharpoonup }{u}\left({\overset{\rightharpoonup }{x}}_0+\overset{\rightharpoonup }{\xi },{t}^{\prime}\right)d{t}^{\prime}\right) \) denotes the displacement of an arbitrarily labelled water parcel with initial position \( {\overset{\rightharpoonup }{x}}_0 \) from time t0 to time t; and t′ represents a time scale related to tidal residual currents.
The ERV (\( {\overset{\rightharpoonup }{u}}_E \)) can be obtained using a fixed current velocity metre, averaged over the tidal cycle as shown in Eq. (8):
where <> indicates the tidal cycle mean function. The LRV \( \left({\overset{\rightharpoonup }{u}}_L\right) \) has the inherent ability to include complete information on coastal subtidal circulation (Zimmerman 1979; Cheng and Casulli 1982), while the ERV (\( {\overset{\rightharpoonup }{u}}_E \)) represents the 0th order of the LRV \( \left({\overset{\rightharpoonup }{u}}_L\right) \) (Feng et al. 1986, 2008). The discrepancy between LRV \( \left({\overset{\rightharpoonup }{u}}_L\right) \) and ERV (\( {\overset{\rightharpoonup }{u}}_E \)) depends on the degree of nonlinearity in the applicable hydrodynamics.
Hydrodynamics in coastal waterbodies, such as tidal estuaries and shallow bays, usually feature nonlinear effects that are relatively stronger than those in marginal seas or open oceans. From marginal seas and open oceans to coastal waters, water depth, h, decreases with topography, while water elevations (i.e., usually tidal elevation), η, increase due to wave shoaling effects. Thus, κ increases, indicating a stronger nonlinearity. In addition, irregular coastlines enhance the flow-field gradient, which also results in a stronger nonlinearity; hence, discrepancies between LRV \( \left({\overset{\rightharpoonup }{u}}_L\right) \) and ERV (\( {\overset{\rightharpoonup }{u}}_E \)) become significant.
Regarding weakly nonlinear hydrodynamics systems, the LRV can be simplified into its first-order form, also called the MTV (Feng et al. 1986, 1990, 2008). The MTV \( \left({\overset{\rightharpoonup }{u}}_M\right) \) can be calculated using Eq. (9):
where \( {\overset{\rightharpoonup }{u}}_S \) denotes the Stokes drift (SD). On some occasions, the ERV (\( {\overset{\rightharpoonup }{u}}_E \)) can show a pattern fairly similar to that of the MTV \( \left({\overset{\rightharpoonup }{u}}_M\right) \), owing to a small SD \( \left({\overset{\rightharpoonup }{u}}_S\right) \). Hence, ERV (\( {\overset{\rightharpoonup }{u}}_E \)) is a widely used parameter in coastal oceanography (e.g., Delhez 1996; Winant 2004; Klingbeil et al. 2019). In some other cases, however, the SD \( \left({\overset{\rightharpoonup }{u}}_S\right) \) is not negligible, resulting in a clear discrepancy between the ERV (\( {\overset{\rightharpoonup }{u}}_E \)) and MTV \( \left({\overset{\rightharpoonup }{u}}_M\right) \) (e.g., Feng et al. 1986; Jiang and Feng 2011).
However, in a generally nonlinear hydrodynamic system, the coastal circulation has to be described in terms of full LRVs\( \left({\overset{\rightharpoonup }{u}}_L\right) \) rather than MTVs \( \left({\overset{\rightharpoonup }{u}}_M\right) \) or ERVs (\( {\overset{\rightharpoonup }{u}}_E \)). A full LRV \( \left({\overset{\rightharpoonup }{u}}_L\right) \) can be expressed as the sum of the ERV (\( {\overset{\rightharpoonup }{u}}_E \)), SD (\( {\overset{\rightharpoonup }{u}}_S \)), Lagrangian drift velocity (\( {\overset{\rightharpoonup }{u}}_{ld} \)), and a higher order of extension (Feng et al. 1986, 2008), as shown in Eq. (10):
The MTV \( \left({\overset{\rightharpoonup }{u}}_M\right) \) cannot be used as a substitute for the LRV\( \left({\overset{\rightharpoonup }{u}}_L\right) \), because of the importance of the absent high-order terms, such as the Lagrangian drift velocity \( \left({\overset{\rightharpoonup }{u}}_{\mathrm{ld}}\right) \) (Feng et al. 1986, 2008; Jiang and Feng 2011). Therefore, the full LRV\( \left({\overset{\rightharpoonup }{u}}_L\right) \) must be used to describe the mass transport trend. The distinction between weakly and generally nonlinear hydrodynamic fields is that the variations in the full LRV with the initial tidal phase are significant, while the ERV and MTV do not (e.g., Feng et al. 2008; Ju et al. 2009).
Appendix 2. Definitions of dimensionless parameters
To analyse the effects of wind and density qualitatively, the Ekman (Ek), Kelvin (Ke), and Wedderburn (W) numbers, which are three key parameters associated with the flow pattern and dynamics of wind- and density-driven flows, were calculated. These parameters have been widely used in coastal studies to examine the controlling dynamics of flow patterns (e.g., Valle-Levinson 2008; Li and Li 2011; Jia and Li 2012).
The Ekman number, Ek, compares the friction with Coriolis effects, as shown in Eq. (11):
where Az denotes the flow eddy viscosity. At each horizontal grid point, we estimated Az as the depth-averaged value of the eddy viscosity calculated using the model. The Coriolis parameter is denoted by f.
The Kelvin number, Ke, can be obtained as shown in Eq. (12):
where B refers to the basin width (Garvine 1995). Ri is given by (g,h)1/2/f, where g, = g∆ρ′/ρ0 denotes the reduced gravity, g represents the gravitational acceleration, ∆ρ′ indicates the contrast between the buoyant water density and density in the bottom layer, and ρ0 is a reference water density. The basin width determines whether the Earth’s rotational effect on the density-driven or wind-driven water exchange is appreciable (Pritchard 1952; Valle-Levinson 2008).
The relative importance of wind-driven and gravitational circulations can be quantified using the Wedderburn number (Monismith 1986) (Eq. 13):
where τwx denotes the along-channel wind, L represents the basin length, ∆ρ stands for the density change over L, and hmean is the averaged depth. Wind-driven circulation is dominant when W > 1, while gravitational circulation is dominant when W < 1 (Geyer 1997).
Appendix 3. Lagrangian momentum balance analysis
We integrated arbitrary momentum terms (denoted as ψ) along particle trajectories, as \( {\int}_{\overset{\rightharpoonup }{\xi }}\psi d\overset{\rightharpoonup }{\xi } \), where \( d\overset{\rightharpoonup }{\xi } \) denotes a piecewise trajectory over one model time step. The difference among the momentum terms of the tide-wind-density, tide-wind, and tide-density systems could be regarded as the effect of wind and density in the tide-wind-density system. The POM employs a sigma coordinate in the vertical direction; thus, the momentum equations are as shown in Eqs. (14)– (16) (Mellor 2004):
The surface boundary condition can be expressed as shown in Eq. (15):
while the bottom boundary condition can be described as in Eq. (16):
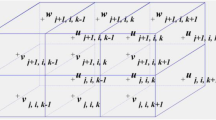
where x, y, and z are conventional Cartesian coordinates; U, V, and ω represent the velocities in the sigma coordinate; D = h + η represents the total water depth; \( \sigma =\frac{z-\eta }{h+\eta } \) represents the sigma coordinate, which ranges from 0 at the surface to -1 at the bottom; and ρo and ρ′ denote the reference water density and density perturbation, respectively; AM represents the horizontal viscosity coefficient, while wu(0) and wv(0) stand for wind momentum fluxes at the surface; Cz represents the bottom friction coefficient; and the integrated momentum terms are divided by the total water depth, D, along each trajectory.
Rights and permissions
About this article

Cite this article
Liu, G., Liu, Z., Gao, H. et al. Initial time dependence of wind- and density-driven Lagrangian residual velocity in a tide-dominated bay. Ocean Dynamics 71, 447–469 (2021). https://doi.org/10.1007/s10236-021-01447-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10236-021-01447-y