
Abstract
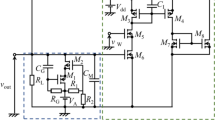
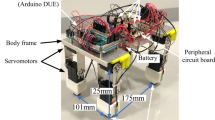
The authors are studying to mimic the mechanism of gait generation in animals and implement the mechanism in robots. Previously, the authors developed a quadruped robot system that spontaneously generates gait through feedback on foot pressure. The neuromorphic circuits that mimic the animal's nervous systems control the legs of the quadruped robot. Neuromorphic circuits are analog electronic circuits that output electrical spikes the same as biological neurons. However, quadruped robots system require digital processing by a microcontroller to transmit signals from pressure sensors to the neuromorphic circuit. In addition, a microcontroller drives the servo motors using a pulsewidth modulation waveform. This paper describes a newly developed neuromorphic circuit that does not require the processing of a microcontroller to convert pressure sensor signals. The authors add the receptor cell model and the integral circuit to the conventional neuromorphic circuit. By converting pressure sensor signals with the receptor cell model and the integral circuit, the neuromorphic circuit can be processed similar to a microcontroller. As a simulation and a measurement result, we confirmed that the proposed neuromorphic circuit could implement in a quadruped robot system.











Similar content being viewed by others

Data availability
The datasets generated during the current study are available from the corresponding author upon reasonable request.
References
McMahon TA (1985) The role of compliance in mammalian running gaits. J Exp Biol 115(1):263–282
Yamanobe A, Hiraga A, Kubo K (1992) Relationships between stride frequency, stride length, step length and velocity with asymmetric gaits in the thoroughbred horse. Jpn J Equine Sci 3(2):143–148
Bhatti Z, Waqas A, Machesar W, Karbasi M (2017) Gait analysis and biomechanics of quadruped motion for procedural animation and robotic simulation. Bahria Univ J Inf Commun Technol 10:2
Hoyt DF, Taylor CR (1981) Gait and the energetics of locomotion in horses. Nature 292:239–240
Orsal D, Cabelguen JM, Perret C (1990) Interlimb coordination during fictive locomotion in the thalamic cat. Exp Brain Res 82(3):536–546
Cruse H, Warnecke H (1992) Coordination of the legs of a slow-walking cat. Exp Brain Res 89(1):147–156
Cartmill M, Lemelin P, Schmitt D (2002) Support polygons and symmetrical gaits in mammals. Zool J Linn Soc 136(3):401–420
Biancardi CM, Minetti AE (2012) Biomechanical determinants of transverse and rotary gallop in cursorial mammals. J Exp Biol 215(23):4144–4156
Grillner S, Zangger P (1979) On the central generation of locomotion in the low spinal cat. Exp Brain Res 34(2):241–261
Bellardita C, Kiehn O (2015) Phenotypic characterization of speed-associated gait changes in mice reveals modular organization of locomotor networks. Curr Biol 25(11):1426–1436
Ruder L, Takeoka A, Arber S (2016) Long-distance descending spinal neurons ensure quadrupedal locomotor stability. Neuron 92(5):1063–1078
Delcomyn F (1980) Neural basis of rhythmic behavior in animal. Science 210(4469):492–498
Nakatani K, Sugimoto Y, Osuka K (2009) Demonstration and analysis of quadrupedal passive dynamic walking. Adv Robot 23(5):483–501
Sugimoto Y, Yoshioka H, Osuka K (2011) Development of super-multi-legged passive dynamic walking robot “Jenkka-III”. In: SICE Annual Conference 2011, IEEE, 2011, pp. 576-579
Owaki D, Kano T, Nagasawa K, Tero A, Ishiguro A (2013) Simple robot suggests physical interlimb communication is essential for quadruped walking. J R Soc Interface 10(78):20120669
Owaki D, Ishiguro A (2017) A quadruped robot exhibiting spontaneous gait transitions from walking to trotting to galloping. Sci Rep 7(1):1–10
Takei Y, Morishita K, Tazawa R, Katsuya K, Saito K (2021) Non-programmed gait generation of quadruped robot using pulse-type hardware neuron models. Artif Life Robot 26:109–115
Johansson RS, Vallbo ÅB (1983) Tactile sensory coding in the glabrous skin of the human hand. Trends Neurosci 6:27–32
Schneeweis DM, Schnapf JL (1995) Photovoltage of rods and cones in the macaque retina. Science 268(5213):1053–1056
Morishita K, Kato S, Takei Y, Saito K (2022) Development of receptor cell model with oscillation frequency dependent on sensor input intensity (in Japanese). Trans Inst Elect Eng Jpn C 142(1):33–39
Acknowledgements
The part of this work was supported by the research grant of Nihon University and Nihon University Multidisciplinary Research Grant for (2020). The part of this work was also supported by the research grant of Nihon University Multidisciplinary Research Grant for (2022).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was presented in part at the joint symposium of the 28th International Symposium on Artificial Life and Robotics, the 8th International Symposium on BioComplexity, and the 6th International Symposium on Swarm Behavior and Bio-Inspired Robotics (Beppu, Oita and Online, January 25–27, 2023).
About this article

Cite this article
Morishita, K., Ishida, A., Okuma, I. et al. Development of neuromorphic circuits with receptor cell model for animal-like gait generation using foot pressure. Artif Life Robotics 29, 161–167 (2024). https://doi.org/10.1007/s10015-023-00911-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-023-00911-w