
Abstract
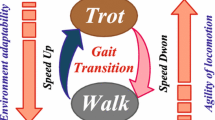
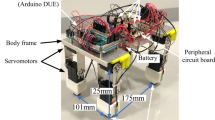
This paper describes a bio-inspired gait generation mechanism for quadruped robots. The gait generation mechanism is an adaptation of one the authors previously developed. Our previous work focused on how a quadruped robot system can generate gaits using pulse-type hardware neuron models (P-HNMs), which have functions similar to the biological neurons. A microcontroller mounted on the robot changed the joints’ angle each time the P-HNMs output a pulse. The joints’ angular velocity changed by the pulse period’s variation according to the toes’ pressure. In this paper, the authors imported the previously developed robot’s body into a dynamic simulator and implemented the bio-inspired gait generation mechanism. The robot model’s mechanical properties are the same as the previously developed robot. The degrees of freedom are excluded except for the legs. Each leg has two joints and a force sensor at the end of the leg. The gait generation mechanism separately controls the legs using each toe’s normal force. Instead of using the P-HNMs’ pulse period variation, the authors defined a simple mathematical formula in which the joints’ angular velocity corresponds to the normal force. The authors confirmed that the robot model could actively generate animals’ gaits due to dynamic simulations. The robot model generated the walk gait and the trot gait according to the locomotion speed. These results show that we can generate gaits for quadruped robots by a straightforward method.












Similar content being viewed by others

References
McMahon TA (1985) The role of compliance in mammalian running gaits. J Exp Biol 115:263–282
Yamanobe A, Hiraga A, Kubo K (1992) Relationships between stride frequency, stride length, step length and velocity with asymmetric gaits in the thoroughbred horse. Jpn J Equine Sci 3:143–148
Bhatti Z, Waqas A, Mahesar W, Karbasi M (2017) Gait analysis and biomechanics of quadruped motion for procedural animation and robotic simulation. Bahria Univ J Inf Commun Technol 10:2
Hoyt D, Taylor C (1981) Gait and the energetics of locomotion in horses. Nature 292:239–240
Grillner S (1975) Locomotion in vertebrates: central mechanisms and reflex interaction. Physiol Rev 55(2):247–304
Duysens J (1980) Inhibition of flexor burst generation by loading ankle extensor muscles in walking cats. Brain Res 187(2):321–332
Mori S (1987) Integration of posture and locomotion in acute decerebrate cats and in awake, freely moving cats. Prog Neurobiol 28:161–195
Orsal D, Cabelguen JM, Perret C (1990) Interlimb coordination during fictive locomotion in the thalamic cat. Exp Brain Res 82:536–546
Cruse H, Warnecke H (1991) Coordination of the legs of a slow-walking cat. Exp Brain Res 89:147–156
Rossignol S, Dubuc R, Gossard JP (2006) Dynamic sensorimotor interactions in locomotion. Physiol Rev 86:89–154
Ruber L, Takeoka A, Arber S (2016) Long-distance descending spinal neurons ensure quadrupedal locomotor stability. Neuron 92(5):1063–1078
Grillner S, Zangger P (1979) On the central generation of locomotion in the low spinal cat. Exp Brain Res 34:241–261
Frigon A, Rossignol S (2006) Experiments and models of sensorimotor interaction during locomotion. Biol Cybern 95:607–627
Bellardita C, Kiehn O (2015) Phenotypic characterization of speed-associated gait changes in mice reveals modular organization of locomotor networks. Curr Biol 25(11):1426–1436
Delcomyn F (1980) Neural basis of rhythmic behavior in animals. Science 210:492–498
Arshavdky YI, Deliagina TG, Orlovsly GN (2016) Central pattern generators: mechanisms of operation and their role in controlling automatic movements. Neurosci Behav Physiol 46(6):696–718
Yuasa H, Ito M (1990) Coordination of many oscillators and generation of locomotory patterns. Biol Cybern 63:177–184
Ito S, Yuasa H, Luo Z, Ito M (1998) A mathematical model of adaptive behavior in quadruped lovomotion. Biol Cybern 78:337–347
Kukillaya R, Proctor J, Holmes P (2009) Neuromechanical models for insect locomotion: stability, maneuverability, and proprioceptive feedback. Chaos 19:1–15
Ishii T, Masakado S, Ishii K (2004) Locomotion of a quadruped robot using CPG. In: 2004 IEEE International Joint Conference on neural networks 4:3179–3184
Kimura H, Fukuoka Y, Cohen AH (2007) Adaptive dynamic walking of a quadruped robot on natural ground based on biological concepts. Int J Robot Res 26(5):475–490
Ekeberg Ö, Pearson K (2005) Computer simulation of stepping in the hind legs of the cat: an examination of mechanisms regulating the stance-to-swing transition. J Neurophysiol 94(6):4256–4268
Ijspeert AJ, Crespi A, Ryczko D, Cabelguen JM (2007) From swimming to walking with a salamander robot driven by a spinal cord model. Science 315(5817):1416–1420
Habu Y, Fukui S, Fukuoka Y (2018) A simple rule for quadrupedal gait transition proposed by a simulated muscle-driven quadruped model with two-level CPGs. In: 2018 IEEE International Conference on robotics and biomimetics (ROBIO), pp 2075–2081
McGeer T (1990) Passive dynamic walking. Int J Robot Res 9(2):62–82
Nakatani K, Sugimoto Y, Osuka K (2009) Demonstration and analysis of quadrupedal passive dynamic walking. Adv Robot 23:483–501
Sugimoto Y, Yoshioka H, Osuka K (2011) Development of super-multi-legged passive dynamic walking robot “Jenkka-III”. In: SICE Annual Conference 2011 pp 576–579
Owaki D, Kano T, Nagasawa K, Tero A, Ishiguro A (2013) Simple robot suggests physical interlimb communication is essential for quadruped walking. J R Soc Interface 10(78):20120669
Owaki D, Ishiguro A (2017) A quadruped robot exhibiting spontaneous gait transitions from walking to trotting to galloping. Sci Rep 277:1–10
Shinomoto S, Kuramoto Y (1986) Phase Transitions in active rotator systems. Progress Theoret Phys 75:1105–1110
Cartmill M, Lemelin P, Schmitt D (2002) Support polygons and symmetrical gaits in mammals. Zool J Linn Soc 136:401–420
Biancardi CM, Minetti AE (2012) Biomechanical determinants of transverse and rotary gallop in cursorial mammals. J Exp Biol 215:4144–4156
Saito K, Ohara M, Abe M, Kaneko M, Uchikoba F (2017) Gait generation of multilegged robots by using hardware artificial neural networks. In: El-Shahat Adel (ed) Advanced applications for artificial neural networks. IntechOpen
Takei Y, Morishita K, Tazawa R, Katsuya K, Saito K (2020) Non-programmed gait generation of quadruped robot using pulse-type hardware neuron models. Artif Life Robot 26:109–115
Acknowledgements
This work was supported by Nihon University Multidisciplinary Research Grant for (2020) and supported by Research Institute of Science and Technology Nihon University College of Science and Technology Leading Research Promotion Grant. Also, the part of the work was supported by JSPS KAKENHI Grant number JP18K04060. The authors appreciated the Nihon University Robotics Society (NUROS).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
About this article

Cite this article
Takei, Y., Tazawa, R., Kaimai, T. et al. Dynamic simulation of non-programmed gait generation of quadruped robot. Artif Life Robotics 27, 480–486 (2022). https://doi.org/10.1007/s10015-022-00765-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-022-00765-8