
Abstract
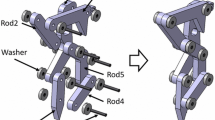
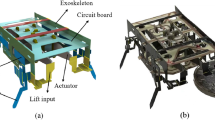
In this paper, the development of a quadruped micro-electro mechanical system (MEMS) microrobot with a four-leg independent mechanism is described. As the actuator mechanism inside small robot bodies is difficult to realize, many microrobots use external field forces such as magnetism and vibration. In this paper, artificial muscle wires that are family of shape memory alloy are used for the force of the actuator. The artificial muscle wire shows the large displacement by passing the electrical current through the material itself. The double four-link mechanism is adopted for the leg system. The link mechanism transforms the linear motion of the artificial muscle wire to the foot step-like pedaling motion. The location of the backward swing motion is lower than that of forward swing motion. This motion generates the locomotion force. As a result, the total length of the constructed quadruped MEMS microrobot was 6 mm. The microrobot could perform similar gait pattern changes as the quadruped animal.









Similar content being viewed by others

References
Baisch AT, Sreetharan PS, Wood RJ (2010) Biologically-inspired locomotion of a 2 g hexapod robot. In Proc. 2010 int. conf. on intelligent robots and systems, Taipei, Republic of China, pp. 5360–5365
Billah M, Ahmed M, Farhana S (2008) Walking hexapod robot in disaster recovery: developing algorithm for terrain negotiation and navigation. International Scholarly and Scientific Research & Innovation, No. 6, pp. 795–800
Mehregany M, Gabriel KJ, Trimmer WSN (1987) Micro gears and turbines etched from silicon. Sens Actuators 12:341–348
Fan LS, Tai YC, Muller RS (1988) Integrated movable micromechanical structures for sensors and actuators. IEEE Trans Electron Devices 35:724–730
Tang WC, Nguyen TH, Howe RT (1989) Laterally driven poly silicon resonant microstructure. Proc. of IEEE micro electro mechanical systems. An investigation of micro structures, sensors, actuators, machines and robots, pp. 53–59
Edqvist E, Snis N, Mohr RC, Scholz O, Corradi P, Gao J, Diéguez A, Wyrsch N, Johansson S (2009) Evaluation of building technology for mass producible millimeter-sized robots using flexible printed circuit boards. J Micromech Microeng 19:1–11
Mingjing Qi, Yangsheng Zhu, Zhiwei Liu, Xiaoyong Zhang, Xiaojun Yan, Liwei Lin (2017) A fast-moving electrostatic crawling insect, IEEE MEMS, pp. 761–764
Donald BR, Levey CG, McGray CD, Paprotny I, Rus D (2006) An untethered, electrostatic, globally controllable MEMS micro-robot. J. Microelectromech Syst 15:1–15
Vogtmann D, Pierre R St, Bergbreiter S (2017) A 25 mg magnetically actuated microrobot walking at >5 body lengths/sec, IEEE MEMS, pp. 179–182
Okazaki K, Ogiwara T, Yang D, Sakata K, Saito K, Sekine Y, Uchikoba F (2011) Development of a pulse control-type MEMS microrobot with a hardware neural network. Artif Life Robot 16:229–233
Saito K, Takato M, Sekine Y, Uchikoba F (2012) Biomimetics micro robot with active hardware neural networks locomotion control and insect-like switching behaviour. Int J Adv Rob Syst 9:1–6
Iwata K, Okane Y, Asano Y, Ishihara Y, Sugita K, Chiba S, Ono S, Takato M, Saito K, Uchikoba F (2015) Hexapod type microrobot controlled by power type IC of artificial neural networks. WSEAS Transac Circuits Syst 15:133–140
Sugita K, Tanaka D, Ono S, Chiba S, Iwata K, Han Y, Takato M, Saito K, Uchikoba F (2016) SMA actuator and pulse-type hardware neural networks IC for fast walking motion of insect-type MEMS microrobot, IEEE international conference on advanced intelligent mechatronics, pp. 431–435
Sugita K, Tanaka T, Nakata Y, Takato M, Saito K, Uchikoba F (2017) Hexapod type MEMS microrobot equipped with an artificial neural networks IC, International conference on artificial life and robotics, pp. 225–228
Takato M, Tatani M, Tanida J, Yamasaki S, Saito K, Uchikoba F (2013) Piezo impact type MEMS rotary actuator and application to millimeter size AI controlled robot, Proceedings of Ultrasonics Symposium (IUS), 2013 IEEE International, pp. 201–204
Tanaka D, Nagashima D, Hidaka T, Takato M, Uchikoba F, Saito K (2016) Gait pattern changing of quadruped robot using pulse-type hardware neural networks. Artif Life Robot 22(1):102–107
Honma M, Japan Patent Kokai, 2002-20848 (2002.1.23)
Acknowledgements
The fabrication of the MEMS microrobot was supported by the Research Center for Micro Functional Devices, Nihon University.
Author information
Authors and Affiliations
Corresponding author
Additional information
The fabrication of the MEMS microrobot was supported by the Research Center for Micro Functional Devices, Nihon University.
About this article

Cite this article
Tanaka, D., Uchiumi, Y., Kawamura, S. et al. Four-leg independent mechanism for MEMS microrobot. Artif Life Robotics 22, 380–384 (2017). https://doi.org/10.1007/s10015-017-0365-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-017-0365-2