
Abstract:
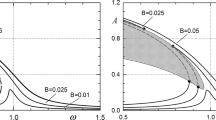
To provide a theoretical methodology to predict the critical condition for capsizing due to broaching, a nonlinear dynamical system approach was applied to the surge–sway–yaw–roll motion of a ship running with an autopilot in following and quartering seas. Fixed points of a mathematical model for the ship motion and unstable manifolds of the fixed point near the wave crest were systematically investigated. As a result, the existence of heteroclinic bifurcation was identified. With numerical experiments, it was confirmed that this heteroclinic bifurcation reasonably well represents the critical condition for capsizing due to broaching. Thus the nonlinear dynamical approach can be substituted for tedious numerical experiments.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received for publication on Nov. 20, 1998; accepted on March 16, 1999
About this article
Cite this article
Umeda, N. Nonlinear dynamics of ship capsizing due to broaching in following and quartering seas. J Mar Sci Technol 4, 16–26 (1999). https://doi.org/10.1007/s007730050003
Issue Date:
DOI: https://doi.org/10.1007/s007730050003