
Abstract
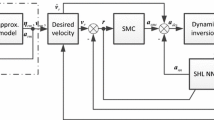
This paper presents a novel optimization-based approach for dynamic positioning (DP) of a fully actuated underwater vehicle equipped with an onboard ultrashort baseline transceiver to provide relative position information of two earth-fixed transponders near the vehicle. The DP system error is defined by the transponders’ positions compared to the desired values, which occur at the vehicle’s target pose (position and orientation). The proposed DP strategy is composed of two loops in a hierarchical structure. In the kinematic loop, the nonlinear model predictive control is used to generate the desired velocity by optimizing a cost function of the predictive trajectories under the constraints of velocity and transponder bearings over a limited time horizon. In the dynamic loop, the neural network model reference adaptive control with pseudo control hedging is utilized to ensure the asymptotical convergence of velocity tracking errors in the presence of uncertainties associated with unknown model parameters, currents and thruster dynamics. The effectiveness of the proposed control scheme is illustrated by comprehensive simulations.













Similar content being viewed by others

References
Sørensen AJ (2011) A survey of dynamic positioning control systems. Ann Rev Control 35:123–136
Do KD (2011) Global robust and adaptive output feedback dynamic positioning of surface ships. J Mar Sci Appl 10:325–332
Fossen TI, Grøvlen A (1998) Nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping. IEEE Trans Control Syst Technol 6(1):121–128
Tannuri EA, Agostinho AC, Morishita HM, Moratelli JL (2010) Dynamic positioning systems: an experimental analysis of sliding mode control. Control Eng Pract 18:1121–1132
Du J, Yang Y, Wang D, Guo C (2013) A robust adaptive neural networks controller for maritime dynamic positioning system. Neurocomputing 110:128–136
Fannemel ÅV (2008) Dynamic positioning by nonlinear model predictive control. Master’s thesis, Norwegian University of Science and Technology, Norway
Panagoua D, Kyriakopoulos KJ (2014) Dynamic positioning for an underactuated marine vehicle using hybrid control. Int J Control 87(2):264–280
Fossen TI (2002) Marine control systems: guidance, navigation and control of ships, rigs and underwater vehicles. Marine Cybernetics AS, Trondheim
Smallwood DA, Whitcomb LL (2004) Model-based dynamic positioning of underwater robotic vehicles: theory and experiment. IEEE J Ocean Eng 29(1):169–186
Riedel JS (2000) Shallow water station keeping of an autonomous underwater vehicle: the experimental results of a disturbance compensation controller. In: MTS/IEEE Oceans conference, September, Providence, RI, pp 1017–1028
Chiaverini AG, Sarkar S, West N (2001) Adaptive control of an autonomous underwater vehicle: experimental results on ODIN. IEEE Trans Control Syst Technol 9(5):756–765
Hoang NQ, Kreuzer E (2007) Adaptive PD-controller for positioning of a remotely operated vehicle close to an underwater structure: theory and experiments. Control Eng Pract 15:411–419
Bessa WM, Dutra MS, Kreuzer E (2013) Dynamic positioning dynamic positioning of underwater robotic vehicles with thruster dynamics compensation. Int J Adv Robot Syst 10:325
Garcia-Valdovinos LG, Salgado-Jimenez T (2011) On the dynamic positioning control of underwater vehicles subject to ocean currents. In: International conference on electrical engineering computing science and automatic control, October 26–28, pp 1–6
Li JH, Lee PM (2005) A neural network adaptive controller design for free-pitch-angle diving behavior of an autonomous underwater vehicle. Robot Auton Syst 52:132–147
Zhang LJ, Qi X, Pang YJ (2009) Adaptive output feedback control based on DRFNN for AUV. Ocean Eng 36:716–722
Leonessa A, VanZwieten T, Morel Y (2006) Neural network model reference adaptive control of marine vehicles. In: Menini L, Zaccarian L, Abdallah CT (eds) Current trends in nonlinear systems and control systems and control: foundations and applications, Birkhäuser Boston, Cambridge, pp 421–440
Xia G, Pang C, Wang H, Le Y (2013) Adaptive neural network controller applied to dynamic positioning of a remotely operated vehicle. In: MTS/IEEE Oceans conference, Bergen, pp 1–6
Hsu L, Costa RR, Lizarralde FC, da Cunha JPVS (2000) Dynamic positioning of remotely operated underwater vehicles. IEEE Robot Autom Mag 7(3):21–31
Caccia M (2007) Vision-based ROV horizontal motion control: near-seafloor experimental results. Control Eng Pract 15:703–714
Jean-Francois L (2002) Application of visual servoing to the dynamic positioning of an underwater vehicle. Doctor’s thesis, Heriot-Watt University, UK
Silpa-Anan C (2001) Autonomous underwater robot: vision and control. Master’s thesis, Australian National University, Australia
Yoerger DR, Cooke JG, Slotine J-JE (1990) The influence of thruster dynamics on underwater vehicle behavior and their incorporation into control system design. IEEE J Ocean Eng 15(3):167–178
Whitcomb LL, Yoerger DR (1999) Development, comparison, and preliminary experimental validation of non-linear dynamic thruster models. IEEE J Ocean Eng 24(4):481–494
Maurovic I, Baotic M, Petrovic I (2011) Explicit model predictive control for trajectory tracking with mobile robots. In: IEEE/ASME international conference on advanced intelligent mechatronics, July 3–7, pp 712–717
Dauer J, Faulwasser T, Lorenz S, Findeisen R (2013) Optimization-based feedforward path following for model reference adaptive control of an unmanned helicopter. In: AIAA guidance, navigation and control conference, Boston, MA
Molero A, Dunia R, Cappelletto J, Fernandez G (2011) Model predictive control of remotely operated underwater vehicles. In: IEEE conference on decision and control and european control conference, December 12–15, pp 2058–2063
Johnson EN (2000) Limited authority adaptive flight control. Doctor’s thesis, Georgia Inst. of Technology, USA
Lewis FL, Jagannathan S, Yeşildirek A (1997) Neural network control of robot arms and nonlinear systems. Neural Systems for Control. Academic Press, San Diego, pp 161–211
Slotine JJ, Li W (1991) Applied nonlinear control. Prentice Hall, Englewood Cliffs
Acknowledgments
This research is supported by the National Natural Science Foundation of China under the Grant No. 51279164.
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Gao, J., Liu, C. & Proctor, A. Nonlinear model predictive dynamic positioning control of an underwater vehicle with an onboard USBL system. J Mar Sci Technol 21, 57–69 (2016). https://doi.org/10.1007/s00773-015-0332-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-015-0332-3