
Abstract
The three-dimensional attitude stabilization of a satellite using fluid rings is proposed in the present paper. The general formulation of the system that comprises a satellite and three fluid rings, one on each axis, is obtained through Euler’s moment equations. The linearized system model is derived and the stability conditions are obtained. Linear control laws and nonlinear control laws based on sliding mode control techniques are developed for fluid control torques. The numerical simulation of the governing nonlinear equations of motion of the system along with stability analysis establishes the feasibility of achieving desired attitude stabilization of the satellite. The fluid controllers are successful in stabilizing the attitude of the satellite in presence of high attitude disturbance torques and intermittent actuators’ failures. In the case of sudden attitude disturbance torques, the nonlinear fluid controllers outperform the linear fluid controllers with virtually no effect on the satellite attitude response. The proposed attitude stabilization method may find applications in future satellite missions.
Similar content being viewed by others

Abbreviations
- A :
-
cross-sectional area of the fluid ring, πD 2/4 (m2)
- C 1 :
-
ρπr 5/I x , a nondimensional fluid parameter
- C 2 :
-
μ/(ρrDΩ), a nondimensional fluid parameter
- C 3, C 4 :
-
\({C_1\hat{{D}}^{2}/4,8C_1C_2\hat{{D}}}\)
- D :
-
cross-sectional diameter of the fluid ring (m)
- \({\hat{{D}}}\) :
-
D/r, dimensionless diameter of the fluid ring
- f :
-
Darcy–Wiesbach resistance coefficient
- G :
-
universal gravitational constant (m3 kg−1 s−2)
- I k :
-
principal centroidal moment of inertia of satellite about k-axis, k = x, y, z (kg-m2)
- \({I_{kj}^{f}}\) :
-
principal centroidal moment of inertia of fluid ring-j about k-axis, k = x, y, z (kg-m2)
- K 1, K 2 :
-
(I x − I y )/I z , (I x − I z )/I y ; satellite mass distribution parameter
- K 3, K 4 :
-
I y /I x = (1 − K 1)/(1 − K 1 K 2), I z /I x = (1 − K 2)/(1 − K 1 K 2)
- \({K_{tj}^{f}}\) :
-
\({\frac{I_{tj}^{f}}{I_x}, (t=x,\;y,\;z)}\)
- \({K_t^{f}}\) :
-
\({\sum_{j=1}^3 {K_{tj}^{f}} , (t=x,\;y,\;z)}\)
- \({K_3^{s}, K_4^{s}}\) :
-
\({K_{3}+K_y^{f}, K_{4}+K_z^{f}}\)
- M E :
-
Earth’s mass (kg)
- U β :
-
external torque vector acting on the fluid motion (Nm)
- u β :
-
U β /(I x Ω2)
- r :
-
mean radius of the fluid ring (m)
- R :
-
orbital radius (m)
- R E :
-
Earth radius (m)
- R n :
-
Reynolds number, \({\rho {\rm Dr}\dot {\beta}/\mu}\) for circular fluid ring
- S :
-
system mass center
- S − X 0 Y 0 Z 0 :
-
coordinate axes in the local vertical frame
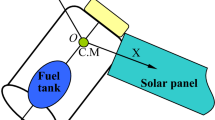
- S − XYZ :
-
satellite body coordinate frame
- U j :
-
fluid frictional torque about the jth fluid ring axis of symmetry (Nm)
- U cj :
-
fluid control torque applied by pump in the jth fluid ring (Nm)
- u j , u cj :
-
U j /(I x Ω2),U cj /(I x Ω2)
- \({\alpha,\phi,\gamma}\) :
-
satellite pitch, roll and yaw angles, respectively (deg)
- \({\alpha_{d},\phi_{d},\gamma_{d}}\) :
-
desired or commanded satellite pitch, roll and yaw angles (deg)
- \({\alpha_{0},\phi_{0},\gamma_{0}}\) :
-
\({\alpha,\phi,\gamma}\) at θ = 0 (deg)
- \({{\alpha}^{\prime}_0,{\phi}^{\prime}_0,{\gamma}^{\prime}_0}\) :
-
\({{\alpha}^{\prime},{\phi}^{\prime},{\gamma}^{\prime}}\) at θ = 0
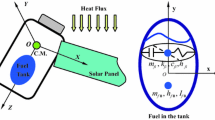
- β j , η j :
-
angular position and span of the fluid slug in the jth fluid ring, respectively (Fig. 2) (deg)
- β je :
-
β j at equilibrium (deg)
- \({{\beta}^{\prime}_j}\) :
-
angular speed of the fluid slug with respect to the fluid ring j (rad/s)
- \({{\beta}^{\prime}_{j0}}\) :
-
\({{\beta}^{\prime}_j}\) at θ = 0
- β j0 :
-
β j at θ = 0 (deg)
- \({{\beta}^{\prime}_0}\) :
-
\({{\beta}^{\prime}_j}\) when \({{\beta}^{\prime}_1={\beta}^{\prime}_2={\beta}^{\prime}_3}\) at θ = 0
- η t :
-
η j when η 1 = η 2 = η 3 (deg)
- ρ :
-
fluid density (kg-m−3)
- τ j :
-
shear stress for the fluid ring j (Nm−2)
- μ :
-
viscosity of the fluid (kgm−1 s −1)
- θ :
-
angle from the reference line (deg)
- ω i :
-
angular rate of the satellite about the body fixed i-axis (rad/s)
- Ω:
-
orbit rate; (GME/R3)1/2 (rad/s)
- (.) j :
-
(.) for the jth fluid ring, j = 1, 2, 3
- (.)0, (.) e :
-
(.) at θ = 0, (.) at equilibrium
- \({(.)^{\prime},(.)^{{\prime}{\prime}}}\) :
-
d(.)/dθ and d 2(.)/dθ 2, respectively
- (.) × :
-
skew-symmetric 3 × 3 matrix associated with (.) of 3 × 1 column matrix
- |(.)|max :
-
absolute maximum amplitudes of (.)
References
Larson, W.J., Wertz, J.R. (eds): Space Mission Analysis and Design, 2nd edn. Kluwer, Dordrecht (1992)
Wertz, J.R. (eds): Spacecraft Attitude Determination and Control. D. Reidel, Dordrecht (1978)
Sabroff, A.D.: Advanced Spacecraft Stabilization and Control Techniques. AIAA 67–878
Kaplan M.H.: Modern Spacecraft Dynamics and Control. Wiley, New York (1976)
Hughes P.C.: Spacecraft Attitude Dynamics. Wiley, New York (1986)
Kumar K.D., Yasaka T.: Satellite attitude stabilization through kite-like tether configuration. J Spacecraft Rockets 39(5), 755–760 (2002)
Wolverton, R.W. (eds): Flight performance handbook for orbital operations: orbital mchanics and astrodynamic formulae, theorems, techniques, and applications. Wiley, New York, pp. 6–32 (1961)
Herman, H.H. Jr.: Method and apparatus for movement of liquids by electromagnetic means. US Patent 3,371,541 (1968)
Wyatt, T.W., Swet, C.J.: Combined fluid flywheel and propulsion system for spacecraft. US Patent 3,862,732 (1975)
Rasmusson, J.K.: Self contained rotator apparatus. US Patent 4,662,178 (1987)
Maynard, R.S.: Fluid momentum controller. US Patent 4,776,541 (1988)
Lurie, B.J., Schier, J.A., Iskenderian, T.C.: Fluid-loop reaction system. US Patent 5,026,008 (1991)
Lurie B.J., Schier J.A.: Liquid-ring attitude-control system for spacecraft. NASA Tech. Briefs 14(9), 82 (1990)
Iskenderian T.C.: Liquid angular-momentum compensator. NASA Tech. Briefs 13(5), 80 (1989)
Laughlin D.R., Sebesta H.R., Eckelkamp-Baker D.: A dual function magnetohydrodynamic (MHD) device for angular motion measurement and control. Adv. Astronaut. Sci. 111(V), 335–348 (2002)
Gilbertson R.G., Busch J.D.: A survey of micro-actuator technologies for future spacecraft missions. J. Br. Interplanet. Soc. 49, 129–138 (1996)
Kelly, A., McChesney, C., Smith, P., Walenta, S., Zaruba, C.: A Performance Test of a Fluidic Momentum Controller in Three Axes, Final Report ASE 463Q, Department of Aerospace Engineering Mechanics, The University of Texas, Austin, 7 May 2004
Passive Gravity-Gradient Libration Dampers, NASA/SP-8071, NASA space vehicle design criteria (Guidance), NASA (Washington, DC, United States) (1971)
Cloop, W., Osborn, L.: Satellite Bus Design for Multiple Satellite System, AIAA/DARPA Meeting on Lightweight Satellite Systems, Monterey, pp. 105–115 (1987)
Fleeter, R., Warner, R.: Guidance and control of miniature satellites. In: Nishimura, T. (ed.) Automatic Control in Aerospace: Selected Papers from the IFAC Symposium, Tsukuba, Japan. Pergamon Press, 1990, pp. 243–248 (1989)
Martinelli M.I., Sánchez Peña R.S.: Passive 3 axis attitude control of MSU-1 pico-satellites. Acta Astronaut 56, 507–517 (2005)
Dally J.W., Harleman R.F.: Fluid Dynamics, pp. 259–281. Addison-Wesley, Massachusetts (1966)
Perruquetti, W., Barbot, J.P. (eds): Sliding mode control in engineering. Marcel Dekker, Inc., New York (2002)
International Mathematical and Statistical Library (IMSL), Math Library, ver. 3.0. Visual Numerics, Inc., Houston (1997)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kumar, K.D. Satellite attitude stabilization using fluid rings. Acta Mech 208, 117–131 (2009). https://doi.org/10.1007/s00707-008-0132-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-008-0132-5