
Abstract
Background
This report described the surgical nuance of a challenging deep-seated corpus callosum arteriovenous malformation (AVM) using a novel robotic digital microscope.
Method
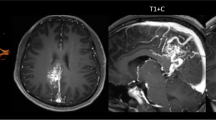
A 64-year-old male was admitted to treat a ruptured corpus callosum AVM. In order to facilitate surgical manipulation under the robotic digital microscope, a gravity-assisted supine position was utilized. Intraoperatively, identifying and preserving the transit and bystander artery is important while skeletonizing the anterior cerebral artery. The nidus was totally resected and the patient was discharged without sequella.
Conclusion
It is feasible to perform complicated AVM resection under the robotic digital microscope with a rigorous surgical plan.




Similar content being viewed by others

References
Cilliers K, Page BJ (2016) Review of the anatomy of the distal anterior cerebral artery and its anomalies. Turk Neurosurg 26:653–661
Fiani B, Jarrah R, Griepp DW, Adukuzhiyil J (2021) The role of 3D exoscope systems in neurosurgery: an optical innovation. Cureus 13:e15878
Maurer S, Prinz V, Qasem LE, Lucia KE, Rösler J, Picht T, Konczalla J, Czabanka M (2021) Evaluation of a novel three-dimensional robotic digital microscope (Aeos) in neurosurgery. Cancers (Basel) 13(17):4273
Montemurro N, Scerrati A, Ricciardi L, Trevisi G (2021) The exoscope in neurosurgery: an overview of the current literature of intraoperative use in brain and spine surgery. J Clin Med 11(1):223
Rhoton AL Jr (2002) The supratentorial arteries. Neurosurgery 51:S53–120
Rossmann T, Veldeman M, Nurminen V, Huhtakangas J, Niemelä M, Lehecka M (2022) 3D exoscopes are non-inferior to operating microscopes in aneurysm surgery: comparative single-surgeon series of 52 consecutive cases. World Neurosurg 170:200–213
Acknowledgements
This study was sponsored by the CAMS Innovation Fund for Medical Sciences (CIFMS, 2019-I2M-5-008), the National Natural Science Foundation of China (No. 82201461), the Shanghai Sailing Program (No. 22YF1404500), Pudong New Area Science and Technology Development Fund(No. PKX2020-R03) , and the Fujian Province Science and Technology Innovation Joint Fund (No. 2021Y9135).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Research involving human participants
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards. The study was approved by Huashan Hospital Institutional Review Board (HIRB), Fudan University, Shanghai, China
Informed consent
It represents a video of a surgical case. The patient gave approval for this publication
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Key points
1. The surgical removal of a challenging deep-seated corpus callosum AVM should be well-planned perioperatively.
2. The preoperative instruments setup aims to achieve the optimal ergonomics of the robotic digital microscope. .
3. Deliberate practice is an effective method for improving the performance of manipulating the robotic digital microscope .
4. The gravity-assisted supine position is beneficial to achieve brain autoretratcion.
5. The neuronavigation system is essential to determine the optimal surgical trajectory without violating the frontal bridging veins.
6. The lock-on-target function can help the camera return to saved targets efficiently when moving around the robotic digital microscope.
7. Identifying and preserving the transit and bystander artery is important while dissecting the AVM nidus.
8. It is critical to secure the feeders of the AVM nidus before transecting the drainage veins.
9. The ICGVA helps confirm the patency of ACA, its major branches, and the residue nidus.
10. It is feasible to perform complicated AVM resection under the robotic digital microscope with a rigorous surgical plan.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 (MP4 55179 KB)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Su, X., Wang, Z., Yang, Z. et al. How I do it? Surgical removal of a corpus callosum arteriovenous malformation using a robotic digital microscope. Acta Neurochir 165, 1609–1613 (2023). https://doi.org/10.1007/s00701-023-05574-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00701-023-05574-x