
Abstract
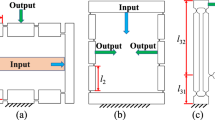
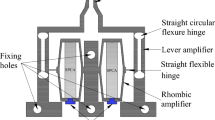
This work presented the design and test of a double-arm actuated compliant piezoelectric microgripper based on three-stage amplification mechanism, which can also perceive the gripping displacement and force simultaneously. Developing a proper structure for the microgripper to achieve large amplification ratio in a compact space and to ensure sufficient natural frequency is a fundamental and challenging task. Firstly, the structure of piezoelectric microgripper was designed and the kinematic principle of the amplification mechanism was analyzed. Meanwhile, theoretical and simulation analysis of the statics and dynamics were carried out. Then, the calibration methods for both force and displacement sensors are presented. The calibration coefficients are 0.163 \(\text {mN/mV}\) and 0.040 \(\mu \!\!\text { m/mV}\), respectively. Finally, a series of experiments were performed to verify the performance of the designed microgripper. The test results show that the displacement amplification ratio of the microgripper is 16.8, and the maximum output displacement of 102.30 \(\mu \!\!\text { m}\) and the maximum gripping force of 227.70 \(\text {mN}\) can be reached when applying a sinusoidal input voltage with the frequency of 0.10 Hz and the amplitude of 100 \(\text {V}\). The closed-loop experiment shows that the peak-to-valley errors of both gripping displacement and force are less than 0.49 \(\mu \!\!\text { m}\) and 3.74 \(\text {mN}\) respectively. The obtained natural frequency of 215.1 Hz. The micro-gripper achieves excellent static and dynamic performance in clamping accuracy, natural frequency, clamping range, and dual finger independence.











Similar content being viewed by others
References
Aabid A, Parveez B, Raheman MA, Ibrahim YE, Anjum A, Hrairi M, Parveen N, Zayan JM (2021) A review of piezoelectric material-based structural control and health monitoring techniques for engineering structures: challenges and opportunities. Actuators 10(5)
Awtar Shorya (2013) Analysis of flexure mechanisms in the intermediate displacement range, chapter 3, pages 27–43. Wiley
Chang P-L, Chi I-T, Tran Ngoc DK, Wang D-A (2020) Design and modeling of a compliant gripper with parallel movement of jaws. Mech Mach Theory 152:103942
Chen T, Sun L, Chen L, Rong W, Li X (2010) A hybrid-type electrostatically driven microgripper with an integrated vacuum tool. Sens Actu A: Phys 158(2):320–327
Chen W, Zhang X, Li H, Wei J, Fatikow S (2017) Nonlinear analysis and optimal design of a novel piezoelectric-driven compliant microgripper. Mech Mach Theory 118:32–52
Chen X, Deng Z, Siya H, Gao J, Gao X (2019) Design of a flexible piezoelectric microgripper based on combined amplification principles. Nanotechnol Precis Eng 2(3):138–143
Ding B, Yang Z-X, Xiao X, Zhang G (2019) Design of reconfigurable planar micro-positioning stages based on function modules. IEEE Access 7:15102–15112
Fard-Vatan HM, Hamedi M (2020) Design, analysis and fabrication of a novel hybrid electrothermal microgripper in microassembly cell. Microelectron Eng 231:111374
Han L, Fang Y, Ren X, Zhang X (2015) Improved direct inverse tracking control of a piezoelectric tube scanner for high-speed afm imaging. Mechatronics 31:10
Jalili B, Aghaee N, Jalili P, Ganji DD (2022) Novel usage of the curved rectangular fin on the heat transfer of a double-pipe heat exchanger with a nanofluid. Case Stud Therm Eng 35:102086
Jalili B, Sadighi S, Jalili P, Ganji DD (2022) Numerical analysis of mhd nanofluid flow and heat transfer in a circular porous medium containing a cassini oval under the influence of the lorentz and buoyancy forces. Heat Transf 51(7):6122–6138
Jalili P, Kazerani K, Jalili B, Ganji DD (2022) Investigation of thermal analysis and pressure drop in non-continuous helical baffle with different helix angles and hybrid nano-particles. Case Stud Therm Eng 36:102209
Koo B-W, Hong S-P, Kim S-I, Kang CS, Han S-S, Oh Kyu H, Kim Young-Woon (2015) Design and application of a novel in situ nano-manipulation stage for transmission electron microscopy. Microsc Microanal 21(2):298–306
Liang C, Wang F, Tian Y, Zhao X, Zhang D (2017) Development of a high speed and precision wire clamp with both position and force regulations. Robot Comput Integr Manuf 44:208–217
Liang C, Wang F, Shi B, Huo Z, Zhou K, Tian Y, Zhang D (2018) Design and control of a novel asymmetrical piezoelectric actuated microgripper for micromanipulation. Sens Actu A Phys 269:227–237
Lyu Z, Qingsong X (2021) Recent design and development of piezoelectric-actuated compliant microgrippers: a review. Sens Actu A Phys 331:113002
Nah SK, Zhong ZW (2007) A microgripper using piezoelectric actuation for micro-object manipulation. Sens Actu A Phys 133(1):218–224
Oden JT, Ripperger EA, Saunders H (1982) Mechanics of Elastic Structures (2nd Edition). J Mech Design 104(4):681–682
Paros JM, Weisbord L (1965) How to design flexure hinges. Mach Des
Ren B, Dai J, Zhong Q (2020) Ude-based robust output feedback control with applications to a piezoelectric stage. IEEE Trans Ind Electron 67(9):7819–7828
Wang G, Rao C (2015) Adaptive control of piezoelectric fast steering mirror for high precision tracking application. Smart Mater Struct 24(3):035019
Wang DH, Yang Q, Dong HM (2013) A monolithic compliant piezoelectric-driven microgripper: design, modeling, and testing. IEEE/ASME Trans Mech 18(1):138–147
Wang G, Chen G, Bai F (2015) Modeling and identification of asymmetric bouc-wen hysteresis for piezoelectric actuator via a novel differential evolution algorithm. Sens Actu A Phys 235:105–118
Wang K, Wang D-H, Zhao J-Y, Hou S (2021) A novel piezoelectric-actuated microgripper simultaneously integrated microassembly force, gripping force and jaw-displacement sensors: design, simulation and experimental investigation. Smart Mater Struct 31(1):015046
Wang F, Shi B, Huo Z, Tian Y, Zhang D (2021) Control and dynamic releasing method of a piezoelectric actuated microgripper. Precis Eng 68:1–9
Wang W, Jiang Y, Thomas PJ (2021) Structural design and physical mechanism of axial and radial sandwich resonators with piezoelectric ceramics: a review. Sensors 21(4)
Yang YF, Lei TG, Junqiang L, Yanding W (2015) A bridge-type piezoelectric microgripper with integrated position/force sensors. Robot 37(6):655–662
Yong YK, Tien-Fu L, Handley DC (2008) Review of circular flexure hinge design equations and derivation of empirical formulations. Precis Eng 32(2):63–70
Yuguo LJC, Yaoxiang Z (2015) Detection of finger displcement and gripping force of piezoelectric micro-gripper. Opt Precis Eng 23:1372–1379
Zhang Z, Hu H (2009) Comparison of single-notch circular flexure hinge rotational stiffness equations with fea results and derivation of empirical formulations. In: 2009 International Joint Conference on Computational Sciences and Optimization, volume 1, pages 286–288
Zhang J, Yang Y, Lou J, Wei Y, Fu L (2018) Development and hybrid position/force control of a dual-drive macro-fiber-composite microgripper. Sensors 18(4)
Zheng L, Weijie D (2022) Position and force self-sensing piezoelectric valve with hysteresis compensation. J Intell Mater Syst Struct 33(1):170–182
Zubir MNM, Shirinzadeh B, Tian Y (2009) A new design of piezoelectric driven compliant-based microgripper for micromanipulation. Mech Mach Theory 44(12):2248–2264
Acknowledgements
This work is supported by the Key Technologies R & D Program of Sichuan Province, China under Grant No. 23ZDYF0471 and by the Doctoral Research Fund of Southwest University of Science and Technology under Grant No. 22zx7140. The authors also thank the anonymous reviewers for their insightful and constructive comments.
Author information
Authors and Affiliations
Contributions
LN: conceptualization; validation; formal analysis; writing original draft; funding acquisition. GC: investigation; software; analysis; writing revision draft. KH: software; data curation; experiments and testing. GW: conceptualization; methodology; writing- review and editing; funding acquisition. All authors have read and agreed to the final version of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interests, including any financial and non-financial interests, or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ni, L., Chen, G., Hong, K. et al. Design and development of a compliant piezoelectric microgripper based on three-stage amplification. Microsyst Technol 29, 939–952 (2023). https://doi.org/10.1007/s00542-023-05488-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-023-05488-9