
Abstract
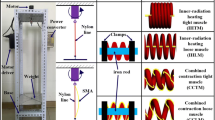
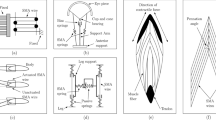
In this paper, we developed a novel artificial muscle using shape memory alloy (SMA) spring bundles. We arranged the SMA springs in honeycomb architecture to increase the utilization of the designed space. This artificial muscle has small size and small weight and can be repeated easily for various biologically inspired applications such as an exoskeleton and exo-suit, where small size and small weight of the actuator are momentous. This muscle consists of two sets of SMA springs: six SMA springs (Set A) and six antagonistic SMA springs (Set B) arranged in hexagon vertexes for forward and reverse motion respectively. This modular muscle can be reduplicated in parallel to increase the output force or in series to increase the stroke length in order to fit the desired actuation application. We used an inertial measurement unit (IMU) sensor to feedback the angle and two sets of temperature sensors were applied to monitor the SMA temperature. The system is modeled and experimentally verified in open-loop and closed-loop control. We used a proportional-integral-derivative (PID) controller to track the desired trajectories. The experimental results show that the system is capable of tracking the desired trajectory with delay time 1.2 s, rise time 2.5 s. (per \(30^{\circ }\)), and overshoot \(2.3\%\).











Similar content being viewed by others

References
Aguiar RA, Savi MA, Pacheco PM (2010) Experimental and numerical investigations of shape memory alloy helical springs. Smart Mater Struct 19(2):025008
Ali HF, Baek H, Jang T, Kim Y (2020) Finger-like mechanism using bending shape memory alloys, In: ASME 2020 29th Conference on Information Storage and Processing Systems. American Society of Mechanical Engineers Digital Collection
Ali HF, Khan AM, Baek H, Shin B, Kim Y (2021) Modeling and control of a finger-like mechanism using bending shape memory alloys. Microsystem Technologies, pp 1–12
Ali HF, Kim Y (2021) Design of a 2 dof shape memory alloy actuator using sma springs. In: ASME 2021 30th Conference on Information Storage and Processing Systems. American Society of Mechanical Engineers Digital Collection, (accepted)
An S-M, Ryu J, Cho M, Cho K-J (2012) Engineering design framework for a shape memory alloy coil spring actuator using a static two-state model. Smart Mater Struct 21(5):055009
Brinson LC (1993) One-dimensional constitutive behavior of shape memory alloys: thermomechanical derivation with non-constant material functions and redefined martensite internal variable. J Intell Mater Syst Struct 4(2):229–242
Doroudchi A, Zakerzadeh MR, Baghani M (2018) Developing a fast response SMA-actuated rotary actuator: modeling and experimental validation, Meccanica, pp 305–317
DynalloyInc. (2021) FLEXINOL(R) Actuator Spring Technical and Design Data. https://www.dynalloy.com/tech_data_springs.php. Accessed Mar 28 2021
Elahinia MH, Ahmadian M (2005) An enhanced sma phenomenological model: I. the shortcomings of the existing models. Smart Mater Struct 14(6):1297
Fan Y, Cheng H, Zhou C, Xie X, Liu Y, Dai L, Zhang J, Qu L (2012) Honeycomb architecture of carbon quantum dots: a new efficient substrate to support gold for stronger sers. Nanoscale 4(5):1776–1781
Hayashi K, Ishikawa K (2021) Honeycomb scaffolds capable of ectopic osteogenesis: histological evaluation of osteoinduction mechanism. Nano Select. https://doi.org/10.1002/nano.202000283
Jani JM, Leary M, Subic A, Gibson MA (2014) A review of shape memory alloy research, applications and opportunities. Mater Design 1980–2015(56):1078–1113
Jeong J, Yasir IB, Han J, Park CH, Bok S-K, Kyung K-U (2019) Design of shape memory alloy-based soft wearable robot for assisting wrist motion. Appl Sci 9(19):4025
Jeong J, Park CH, Kyung K-U (2020) Modeling and analysis of sma actuator embedded in stretchable coolant vascular pursuing artificial muscles. In: 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, pp 5641–5646
Kim Y, Jang T, Gurung H, Mansour NA, Ryu B, Shin B (2019) Bidirectional rotating actuators using shape memory alloy wires. Sensors and Actuators A: Physical 295:512–522
Lee C, Kim M, Kim YJ, Hong N, Ryu S, Kim HJ, Kim S (2017) Soft robot review. Int J Control Automat Syst 15(1):3–15
Liang C, Rogers C (1997) One-dimensional thermomechanical constitutive relations for shape memory materials. J Intell Mater Syst Struct (USA) 8(4):285–302
Meng L, Kang R, Gan D, Chen G, Chen L, Branson DT, Dai JS (2020) A mechanically intelligent crawling robot driven by shape memory alloy and compliant bistable mechanism. J Mech Robot 12(6):061005
Meng L, Kang R, Gan D, Chen G, Dai JS (2019) A shape memory alloy driven crawling robot utilizing a bistable mechanism. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, vol. 59247. American Society of Mechanical Engineers, p V05BT07A012
Miriyev A, Stack K, Lipson H (2017) Soft material for soft actuators. Nat Commun 8(1):1–8
Park SJ, Kim U, Park CH (2020) A novel fabric muscle based on shape memory alloy springs. Soft Robotics 7(3):321–331
Park SJ, Park CH (2019) Suit-type wearable robot powered by shape-memory-alloy-based fabric muscle. Sci Rep 9(1):1–8
Park CH, Son YS (2017) Sma spring-based artificial muscle actuated by hot and cool water using faucet-like valve. In Active and Passive Smart Structures and Integrated Systems 2017, vol. 10164. International Society for Optics and Photonics, p 101640T
Simone F, Rizzello G, Seelecke S (2017) Metal muscles and nerves-a self-sensing sma-actuated hand concept. Smart Mater Struct 26(9):095007
Tai K, El-Sayed A-R, Shahriari M, Biglarbegian M, Mahmud S (2016) State of the art robotic grippers and applications. Robotics 5(2):11
Tanaka K (1986) A thermomechanical sketch of shape memory effect: one-dimensional tensile behavior. Res. Mechanica 18:251–263
Tobushi H, Tanaka K (1991) Deformation of a shape memory alloy helical spring: analysis based on stress-strain-temperature relation. JSME Int J Ser. 1, Solid Mech Strength Mater 34(1):83–89
Veale AJ, Xie SQ (2016) Towards compliant and wearable robotic orthoses: a review of current and emerging actuator technologies. Med Eng Phys 38(4):317–325
Wang W, Yu CY, Abrego Serrano PA, Ahn S-H (2020) Shape memory alloy-based soft finger with changeable bending length using targeted variable stiffness. Soft Robotics 7(3):283–291
Wu F, Srot V, Chen S, Lorger S, van Aken PA, Maier J, Yu Y (2019) 3d honeycomb architecture enables a high-rate and long-life iron (iii) fluoride-lithium battery. Adv Mater 31(43):1905146
Acknowledgements
This work was mainly supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. 2017R1A2B4008056, No. 2021R1H1A2093798, and No. 2022R1A2C1011462). This work was also in part supported by “Regional Innovation Strategy (RIS)” through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (MOE) (2021RIS-004). Also, the first author is funded by the Brain Pool (BP) program by the National Research Foundation (NRF) with BP Grant (2019H1D3A1A01071124). Authors would like to thank Eng. Esraa Mostafa for sharing hand sketches and discussions. Authors are grateful to Prof. Ahmed M. R. Fath Elbab, and Dr. Mahmoud Elsamanty for their useful comments and advice. Also, authors would like to thank all the researchers at the laboratory of Intelligent Control and Robotic Systems (ICRS), Hanbat National University, for support and motivation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ali, H.F.M., Kim, Y. Novel artificial muscle using shape memory alloy spring bundles in honeycomb architecture in Bi-directions. Microsyst Technol 28, 2315–2324 (2022). https://doi.org/10.1007/s00542-022-05304-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-022-05304-w