
Abstract
In this research we present an algorithm for a six-wheeled robotic vehicle with articulated suspension (RVAS) to estimate the vehicle velocity and acceleration states, slip ratio and the tire forces. The estimation algorithm consists of six parts. In the first part, a wheel state estimator estimates the wheel rotational speed and its angular acceleration using Kalman filter, which is used to estimate the longitudinal tire force distribution in the second part. The third part is to estimate respective longitudinal, lateral, and vertical speeds of the vehicle and wheels. Based on these speeds, the slip ratio and slip angle are estimated in the fourth part. In the fifth part, the vertical tire force is then estimated. In the sixth part, the lateral tire force is then estimated. For a simulation test environment, the RVAS dynamic model is developed using Matlab and Simulink. The estimation algorithm is then verified in simulation using the vehicle test data and different test scenarios. It is found from simulation results that the proposed estimation algorithm can estimate the vehicle states, longitudinal tire forces efficiently. Moreover, a small prototype of the robotic vehicle is fabricated for experimental verification of the estimation algorithm. Various experiments are executed in pavement and off-road driving to estimate the wheel angular position, velocity and acceleration states and finally the slip ratio is estimated in these situations.




















Similar content being viewed by others

Abbreviations
- g:
-
Gravity acceleration
- \(c_{d}\) :
-
Rotational damping coefficient of the arm rod
- \({I}_{x} {, I}_{y} {, I}_{z}\) :
-
Moments of inertia of the vehicle about the roll, pitch and yaw axes respectively
- \(I_{arm\_x}{, I}_{arm\_y}{, I}_{arm\_z}\) :
-
Moments of inertia of the arm rod about its x, y, z axes respectively
- \(I_{w\_x}\) :
-
Moment of inertia of the wheel about its x axis
- \(I_{w\_z}\) :
-
Moment of inertia of the wheel about its z axis
- \(J_{w}\) :
-
Moment of inertia of the wheel about its rotational axis
- \(k_{s}\) :
-
Rotational spring stiffness of the arm rod
- \(l_{arm}\) :
-
Length of the arm rod
- \(l_{f}\) :
-
Distance from the vehicle c.g to the front arm axle
- \(l_{m}\) :
-
Distance from the vehicle c.g. to the middle arm axle
- \(l_{r}\) :
-
Distance from the vehicle c.g. to the rear arm axle
- \(m_{arm} {, m}_{s} {, m}_{w}\) :
-
Masses of the arm rod, sprung mass of the vehicle and the in-wheel motor respectively
- \(M_{sxi}\) :
-
Internal moment acting on the sprung mass about the roll axis at the rotational center of the ith arm rod
- \(M_{szi}\) :
-
Internal moment acting on the sprung mass about the yaw axis at the rotational center of the ith arm rod
- \(M_{z\_des}\) :
-
Yaw moment input
- \(t_{w}\) :
-
Half of the vehicle width
- \(\omega_{arm\_i}\) :
-
Angular velocity vector of the ith arm rod
- \({\omega }_{{{\text{cg}}}}\) :
-
Vehicle angular velocity vector
- \({\omega }_{i}\) :
-
Angular speed at the ith wheel
- \(\hat{\omega }_{i}\) :
-
Estimated angular speed at the ith wheel
- \(\theta_{arm\_i }(0)\) :
-
Initial arm angle at time 0
- R:
-
Tire radius of the ith wheel
- \({\uplambda }_{{\text{i}}}\) :
-
Slip ratio at the ith wheel
- \(F_{sxi}\), \({ }F_{syi}\), \({ }F_{szi}\) :
-
Longitudinal, lateral, and vertical internal forces acting on a sprung mass at the rotational center of the ith arm rod respectively
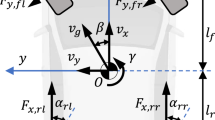
- \(F_{txi}\) , \({ }F_{tyi}\) , \({ }F_{tzi}\) :
-
Longitudinal, lateral, and vertical tire forces at the ith wheel respectively
- \(\dot{r}_{cg},\) \( \, \ddot{r}_{cg}\) :
-
Vehicle velocity, and acceleration vectors
- \(\ddot{r}_{{\text{i}}}\) :
-
Translational acceleration vector of the rotational center of the ith arm rod
- \(\ddot{r}_{{{\text{wi}}}}\) :
-
Translational acceleration vector of the ith wheel
- \(T_{i}\) :
-
Measured wheel torque of the ith wheel
- \(T_{self\_i}\) :
-
Self-aligning torque at the ith wheel
- \(T_{S\& D\_i}\) :
-
Sum of spring and damping torques of the ith arm rod
- \({\text{v}}_{x} \text{, }{\text{v}}_{{\text{y}}}\text{, }{\text{v}}_{{\text{z}}}\) :
-
Vehicle longitudinal, lateral and vertical velocities
- \(\alpha_{i}\) :
-
Slip angle at the ith wheel
- \(\alpha_{cg}\) :
-
Vehicle angular acceleration vector
- \(\alpha_{arm\_i}\) :
-
Angular acceleration vector of the ith arm rod
- \(\dot{\phi }\text{, }\dot{\theta }\text{, }\dot{\varphi }\) :
-
Roll rate, pitch rate, yaw rate
- \(\theta_{arm\_i} \text{, } \theta_{arm\_static}\) :
-
Arm angle at ith arm rod, and static arm
References
Acosta M, Kanarachos S, Blundell M (2017) Review: road friction virtual sensing: a review of estimation techniques with emphasis on low excitation approaches. Appl Sci 7(12):1230
Adams Manual (2020) Tire models, using the Fiala handling force model. MSC Software Corporation. https://www.mscsoftware.com/. Accessed 2 Mar 2020
Ali HF, Oh SW, Kim Y (2020a) Comparative study of extended and unscented Kalman filters for estimating motion states of an autonomous vehicle-trailer system. In: Int. Conf. Recent Dev. in Mechanical Eng. (ICRAME)
Ali HFM, Oh S-W, Kim Y (2020b) State estimation of a robotic vehicle with six in-wheel drives using Kalman filter. In ASME int. conf. information storage and processing systems, ISPS2020, June 25–26, 2020, Milpitas, CA, USA
Blundell M, Harty D (2004) The multibody systems approach to vehicle dynamics. Elsevier, Oxford
Doumiati M, Charara A, Victorino A, Lechner D, Dubuisson B (2013) Vehicle dynamics estimation using Kalman filtering. Wiley, Hoboken
Ghandour R, Victorino A, Doumiati M, Charara A (2010) Tire/road friction coefficient estimation applied to road safety. In Proceedings of the mediterranean conference on control and automation, MED, Marrakech, Morocco
Hamann H, Hedrick JK, Rhode S, Gauterin F (2014) Tire force estimation for a passenger vehicle with the unscented Kalman filter. In: 2014 IEEE intelligent vehicles symposium proceedings, Dearborn, MI, pp 814–819
Hrgetic M, Deur J, Ivanovic V, Tseng E (2014) Vehicle sideslip angle EKF estimator based on nonlinear vehicle dynamics model and stochastic tire forces modeling. SAE Int J Passeng Cars Mech Syst 7:86–95
Kang J, Kim W, Lee J, Yi K (2010) Skid steering-based control of a robotic vehicle with six in-wheel drives. Proc. Inst Mech Eng Part D J Automob Eng 224:1369–1391
Kim Y (2015) Motion state estimation for an autonomous vehicle-trailer system using Kalman filter-based multisensor data fusion. Int J Asia Life Sci Suppl 11:81–92
Mantaras D, Luque P, Nava J, Riva P, Giron P, Compadre D, Ferran J (2013) Tyre-road grip coefficient assessment. Part 1: Off-line methodology using multibody dynamic simulation and genetic algorithms. Veh Syst Dyn Int J Veh Mech Mob 51:1603–1618
Nada E, Ahmed A, Abd-Alla M (2014) Modified dual unscented kalman filter approach for measuring vehicle states and vehicle parameters. Int J Eng Res Technol 3:1423
Nah J, Seo J, Yi K, Kim W, Lee J (2015) Friction circle estimation-based torque distribution control of six-wheeled independent driving vehicles for terrain-driving performance. Proc Inst Mech Eng Part D J Automob Eng 229(11):1469–1482
Rezaeian A et al (2015) Novel tire force estimation strategy for real-time implementation on vehicle applications. IEEE Trans Veh Technol 64:2231–2241
Zareian A, Azadi S, Kazemi R (2015) Estimation of road friction coefficient using extended Kalman filter, recursive least square, and neural network. Proc Inst Mech Eng Part K: J Multi-body Dyn 230(1):52–68
Zhu X, Kim Y, Minor MA, Qiu C (2017) Autonomous mobile robots in unknown outdoor environments. CRC Press, Boca Raton
Acknowledgements
This research was supported by a grant from Defense Acquisition Program Administration and Agency for Defense Development under contract UD180045RD.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ali, H.F.M., Oh, SW. & Kim, Y. State estimation and experimental verification of a robotic vehicle with six in-wheel drives using Kalman filter. Microsyst Technol 27, 2419–2432 (2021). https://doi.org/10.1007/s00542-020-05148-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-05148-2