
Abstract
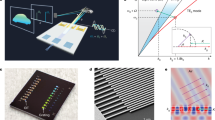
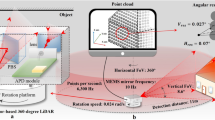
Light detection and ranging (LiDAR) sensors can measure the three-dimensional environment by irradiating near-infrared light and measuring the flight time of light scattered from objects. As the demand for three-dimensional measurement and imaging technology for future applications in autonomous vehicles increases, this technology has become increasingly important. In this paper, we propose an ultra-wide field-of-view (FOV) optical system for LiDAR sensors that can sequentially scan the beam emitted by a high-power laser through a compact and inexpensive beam steering system using a micro-actuator with a compact size and a fisheye lens. The proposed optical system for LiDAR sensors consists of a micro-actuator mounted focusing lens for beam steering, a fisheye lens with a wide FOV, and a relay lens to combine the intermediate image planes of the two lens systems effectively. We also proposed an optical system without a relay lens to modify the fisheye lens design to achieve a smaller size. To confirm the theoretical feasibility, we designed a practical optical system for LiDAR sensors with a FOV of approximately 176°, which is much higher than the FOVs of other non-rotating LiDAR sensors.







Similar content being viewed by others

References
Choi H, Park NC, Kim WC (2019) Optical system design for light detection and ranging with ultra-wide field-of-view using liquid lenses. Microsyst Technol. https://doi.org/10.1007/s00542-019-04490-4
Eldada L (2016) Solid State LiDAR for ubiquitous 3D sensing. GPU technology conference
Favorskaya MN, Jain LC (2017) Overview of LiDAR technologies and equipment for land cover scanning. In: Handbook on advances in remote sensing and geographic information systems, intelligent systems reference library, vol 122. Springer, Cham, pp 515. https://doi.org/10.1007/978-3-319-52308-8_2
Gokturk SB, Yalcin H, Bamji C (2004) A time-of-flight depth sensor: system description, issues and solutions. In: 2004 Conference on computer vision and pattern recognition workshop. Washington, DC, USA, pp 35–35. https://doi.org/10.1109/CVPR.2004.291
Gokturk SB, Yalcin H, Bamji C (2005) A time-of-flight depth sensor—system description, issues and solutions. IEEE Comput Soc Conf Comput Vis Pattern Recognit Workshops. https://doi.org/10.1109/CVPR.2004.291
Hofmann U, Senger F, Soerensen F, Stennchly V, Jensen B, Janes J (2012) Biaxial resonant 7 mm-MEMS mirror for automotive LIDAR application. In: 2012 International conference on optical MEMS and nanophotonics. https://doi.org/10.1109/omems.2012.6318847
Hsu S, Acharya S, Rafii A, New R (2006) Performance of a time-of-flight range camera for intelligent vehicle safety applications. In: Valldorf J, Gessner W (eds) Advanced microsystems for automotive applications 2016. VDI-Buch. Springer, Berlin, Heidelberg. https://doi.org/10.1007/3-540-33410-6_16
Ko B, Jung JS, Lee SY (2006) Design of a slim-type optical pick-up actuator using PMN-PT bimorphs. Smart Mater Struct 15:1912–1918
Kweon G, Laikin M (2011) Fisheye lens. US Patent 8064149B2, 22 Nov 2011
Lee DJ, Woo KS, Park NC, Park YP (2005) Design and optimization of a linear actuator for subminiature optical storage devices. IEEE Trans Magn 41(2):1055–1057
Poulton CV et al (2017) Coherent solid-state LIDAR with silicon photonic optical phased arrays. Opt Lett 42(20):4091–4094
Schuon S, Theobalt C, Davis J, Thrun S (2008) High-quality scanning using time-of-flight depth superresolution. IEEE Comput Soc Conf Comput Vis Pattern Recognit Workshops. https://doi.org/10.1109/CVPRW.2008.4563171
Weisenburger S (2018) Fusion of sensor data advances geospatial technology. LIDAR Magazine. https://lidarmag.com/2018/06/22/fusion-of-sensor-dataadvances-geospatial-technology/. Accessed 22 June 2018
Xinwei W, Yinan C, Wei C, Xiaoquan L, Songtao F, Zhou Y, Youfu L (2015) Three-dimensional range-gated Flash LIDAR for land surface remote sensing. In: Proceedings of SPIE, vol 9260. https://doi.org/10.1117/12.2074906
Yoo HW, Druml N, Brunner D et al (2018) MEMS-based lidar for autonomous driving. Elektrotech Inftech 135:408. https://doi.org/10.1007/s00502-018-0635-2
Zhou G, Yang J, Li X, Yang X (2012) Advances of flash lidar development onboard UAV. Int Arch Photogramm Remote Sens Spatial Inf Sci 39:B3
Zohrabi M, Cormack RH, Gopinath JT (2016) Wide-angle nonmechanical beam steering using liquid lenses. Opt Exp 24:21
Funding
This paper was supported by the Konyang University Research Fund in 2019.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Choi, H., Kim, WC. Optical system design for light detection and ranging sensor with an ultra-wide field-of-view using a micro actuator. Microsyst Technol 26, 3561–3567 (2020). https://doi.org/10.1007/s00542-020-04997-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-04997-1